°@
°@
Kontrol terprogram PLC hidrolik didasarkan pada pengontrol yang dapat diprogram PLC (Programmable Logical Controller) , yang bekerja sama dengan sirkuit kontrol listrik untuk mengontrol arah hidrolik, tekanan, aliran, dll., Untuk memfasilitasi kompilasi program PLC dengan sinyal input dan output sederhana, alih-alih kabel yang rumit Sistem kelistrikan digunakan untuk kontrol hidraulik output besar, dan simulasi perangkat lunak internal PLC digunakan untuk menggantikan komponen kontrol kelistrikan yang sebenarnya seperti Relay , Timer , Counter, dll., Yang dapat mengurangi biaya komponen kontrol listrik dan Untuk mencapai tujuan aplikasi yang nyaman, modifikasi yang mudah dan kabel yang disederhanakan.
°@
Struktur utama
°@
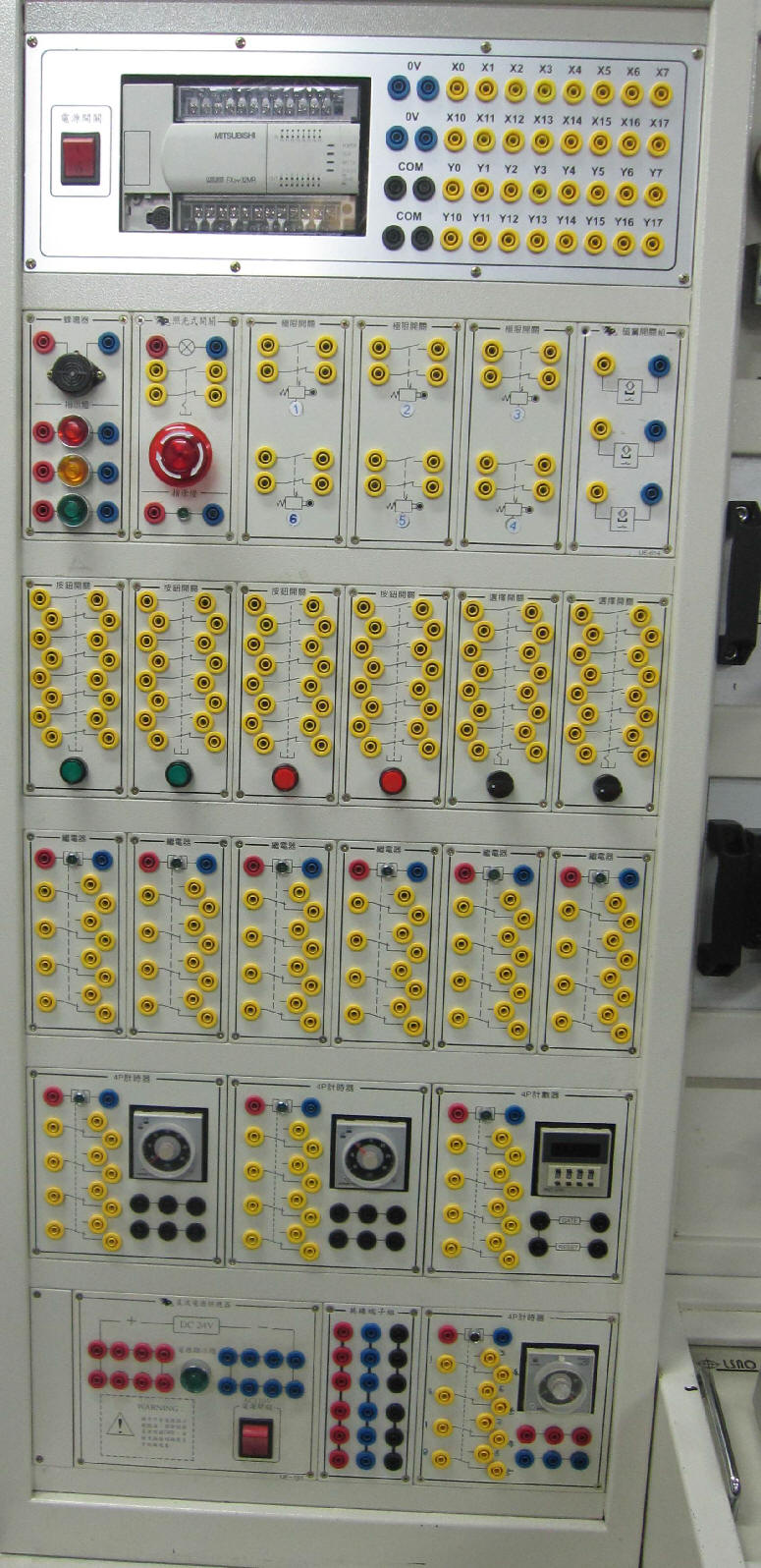
6-1.1 Mitsubishi Electric FX tipe PLC

°@
6-1-2 Deskripsi kode komponen
?1. X : Relai input (X0 ~ X177 , hingga 128 poin )
?2. Y : relai keluaran (Y0 ~ Y177 , hingga 128 poin )
?3. M : relai tambahan ( umumnya: M0 ~ M499 , 500 poin. Retensi kegagalan daya: M500 ~ M1023 , 524 poin )
?4. T : Delayer ( umumnya: 0.1 detik: T0 ~ T199 , 200 poin; 0.01 detik: T200 ~ T245 , 46 poin.
?Retensi kegagalan daya: 0,1 detik: T246 ~ T249 , pukul 4 ; 0,01 detik: T250 ~ T255 , pukul 6 )
5. C : Counter ( umumnya: C0 ~ C99 , 100 poin. Retensi kegagalan daya: C100 ~ C199 , 100 poin ) . Penghitung atas-bawah ( umumnya: C200 ~ C219 , pukul 20. Retensi kegagalan daya: C220 ~ C234 , pukul 15 ) . Penghitung kecepatan tinggi (C235 ~ C255 , 21 poin ) .
6. S : Status relay ( penggunaan awal: S0 ~ S9 , 10 poin. Reset penggunaan: S10 ~ S19 , 10 poin. Penggunaan umum, S20 ~ S499 , 480 poin. Retensi kegagalan daya: S500 ~ S899 , 400 poin ) .
7. K : konstan
8. Relai bantu khusus yang umum digunakan
M8000 selalu ON kontak
Pulsa awal M8002
M8013 pulsa waktu satu detik
Output penuh M8034 dilarang
Migrasi M8040 dilarang
M8200 ~ M8219 atas dan bawah saklar penghitung
°@
°@
6-1.3 Deskripsi instruksi dasar dan perintah tangga langkah°@
A. Instruksi dasar
°@
°@
B. Perintah tangga langkah
Perintah tangga langkah adalah bahasa aplikasi lanjutan dari pengontrol terprogram Mitsubishi.Strukturnya seperti kereta yang memasuki stasiun; struktur program mencakup banyak keadaan (S , Status ) dan kondisi bergerak . Jika status dianggap sebagai stasiun kereta, itu ditandai dengan S0 di bingkai ganda Dapat dikatakan sebagai stasiun utama.Kondisi bergerak adalah perintah kontak untuk memasuki stasiun berikutnya. Program dimulai dari titik awal di atas. Biasanya perintah pulsa awal M8002 membuat eksekusi program memasuki keadaan awal S0 , kemudian tombol start X0 dan setiap kondisi bergerak Buat eksekusi program memasuki setiap status seperti S20 satu per satu (S0 ~ S9 adalah status awal yang dicadangkan, S10 ~ S19 adalah status reset yang dicadangkan ) ; ketika program memasuki status, hanya perintah output di sisi kanan dan kondisi transisi yang lebih rendah yang akan berubah Jika dijalankan, kondisi transisi dan perintah output lainnya akan dimatikan . Jika Anda ingin menjaga agar output tidak dimatikan setelah transisi status, Anda dapat menggunakan instruksi SET , seperti SET Y2 pada gambar , yang akan mati saat status transisi ke S22 . Ini tidak akan dimatikan sampai keadaan S23 dijalankan setelah instruksi RST Y2 dijalankan , danStatus S20 dari OUT Y1 dan S22 status OUT Y3 disebabkan oleh migrasi status dimatikan; akhir program perlu RET (RETURN) instruksi untuk menetapkan titik masuk kembali program kembali ke keadaan awal S0 ( atau kondisi lain seperti S20) iterasi Program whole step ladder dianggap selesai, akhirnya program diakhiri dengan instruksi END . Jika Anda perlu menjalankan instruksi program PLC kapan saja, Anda dapat menuliskannya di bagian depan program ( sebelum M8002 ) .
°@

Diagram struktur dasar perintah tangga langkah
°@
6-1.4 Fungsi keyboard
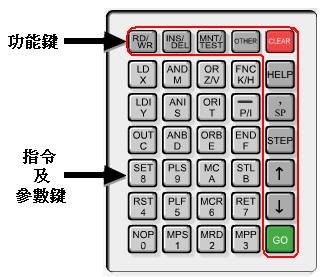
?Deskripsi tombol fungsi
?1. Mode RD / WR saja (Baca) dan tulis (Tulis)
?2. Sisipkan dan hapus (Hapus) perintah INS / DEL
?3. Pemantauan MNT / TEST (MONITOR) dan mode pengujian
?4. LAIN pilihan lain ( panggilan modus layar daftar )
?5. CLEAR clear display
?6. BANTUAN mendaftar tabel nomor instruksi
?7. , SP koma dan tombol spasi (SPASI)
?8. LANGKAH pencarian
?9. °Ű: Pindah ke atas
?10. °ű: Pindah ke bawah
?11. GO : Masukkan ( jalankan ) kunci
°@
6-1.5 Eksekusi program°@
?1. Pelaksanaan program pemantauan RUN
?2. Penyusunan program S
°@
6-1.6 Contoh pengoperasian °@
?A. Program operasi input PLC
?Langkah 1 : Saat daya mati, masukkan buku program ( pembaca ) dan penulis, dan penyelenggara akan beralih ke mode S .
?Langkah 2 : Nyalakan power, pada program book ( reader ) penulis akan menampilkan pilihan ONLINE atau OFFLINE , langsung tekan tombol GO di pojok kanan bawah , setelah memilih mode ONLINE , pada program book ( reader ) penulis akan menampilkan SELECT FUNCTION OR MODE , tekan Tekan tombol RD / WR dua kali, sudut kiri atas buku ( pembaca ) dan tampilan penulis akan menampilkan W, menunjukkan bahwa mode input telah dialihkan ke. Saat ini, tampilan akan menampilkan program asli. Jika tidak, akan menampilkan NOP setelah nomor baris .
?Langkah 3 : Jika ada program di memori, Anda perlu menghapus konten memori, pertama tekan tombol RD / WR untuk beralih ke mode penulisan W, lalu tekan tombol NOP °ų A °ų GO °ų GO untuk menghapus semua konten memori ( bagian garis nol untuk 7999 baris ) atau tekan INS / DEL kunci untuk beralih ke yang D modus DELETE, yang sudut kiri atas dari buku ( reader ) dan penulis layar akan menampilkan D, dan kemudian tekan GO kunci dalam rangka untuk melakukan Program dihapus baris demi baris.
?Langkah 4 : Masuk ke program secara berurutan , dan setelah setiap baris perintah, ketik tombol GO . Setelah program dimasukkan, jika Anda perlu menjalankan program secara langsung, alihkan sakelar di samping terminal host ke RUN , dan indikator RUN pada panel akan menyala, yang menunjukkan Program sudah mulai dijalankan. Saat ini, host akan mendeteksi logika program dengan sendirinya. Jika ada error, lampu error akan terus berkedip sampai program diperbaiki.
°@
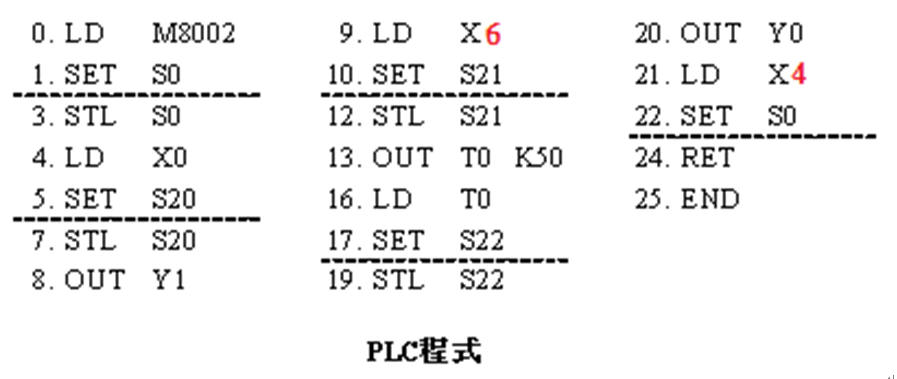
B. Contoh program tangga
Ketika program mulai dijalankan, pulsa awal M8002 akan menyebabkan eksekusi program berhak memasuki kondisi awal S0 dengan SET S0 ( menyatakan status S0 ) dan STL S0 ( status S0 ditetapkan ) . Pada saat ini, Y0 adalah keluaran, menunggu kondisi transisi X0 terpicu; Setelah tombol start X0 ditekan, hak eksekusi program memasuki keadaan S20 , saat ini Y1 dikeluarkan, dan Y0 dimatikan, menunggu kondisi perjalanan X1 dipicu; setelah kontak X1 dihidupkan, eksekusi program benar Masuk status S21 , saat ini output Y2 , Y1 dimatikan, menunggu kondisi perjalanan X2 dipicu; setelah kontak X2 dihidupkan, hak eksekusi program memasuki status S22 , pada saat ini output Y3 , Y2 tetap pada output, menunggu kondisi perjalanan X3 dipicu; setelah kontak X3 dihidupkan, eksekusi program langsung memasuki keadaan S23 , saat ini output Y2 dimatikan oleh instruksi RST Y2 , dan Y3 juga dimatikan karena pergeseran status off, tunggu kondisi transisi X4 dipicu; ke X setelah kontak yang dapat dipindahkan diaktifkan potong, dilipat kembali ke awal kondisi eksekusi program S0 , keluaran Y0 , tunggu kondisi transisi X0 dipicu.
°@
6-1.7 Prosedur dan alternatif start tekanan hidrolik
Ketika tekanan hidrolik dimulai, baut penyetelan katup pelepasan harus dilonggarkan untuk membuat tekanan pengaturan sistem nol sebelum menyalakan daya motor pompa hidrolik.Setelah pompa hidrolik berjalan, baut penyetelan katup pelepasan harus dikencangkan secara bertahap untuk meningkatkan tekanan pengaturan sistem secara bertahap. Saat pompa hidrolik dimatikan, baut penyetelan katup pelepas harus dilonggarkan terlebih dahulu, sehingga tekanan turun menjadi nol sebelum mematikan daya pompa hidrolik.
Ketika posisi pemasangan katup pelepasan tidak nyaman untuk disesuaikan, katup solenoid dua-port dua posisi yang biasanya terbuka dapat dipasang antara sumber tekanan dan ujung balik oli untuk membuat ujung tekanan P dan ujung balik oli T berkomunikasi dan melepaskan beban. Setelah mulai berputar di bawah kondisi beban nol, daya disuplai ke katup solenoid 2/2 pada saat yang sama ketika catu daya PLC menjalankan program untuk memutus jalur pengembalian oli PT , sehingga tekanan naik ke tekanan sistem yang disetel.Ketika sistem PLC dimatikan, katup solenoid mengalami kerusakan magnet Secara otomatis mengembalikan kondisi pelepas tekanan hidrolik PT Tong.

°@
6-1.8 Pengawatan listrik
°@
°@
1. Saat memasang kabel, pastikan untuk mematikan daya untuk menghindari sengatan listrik.
2. Pegang ujung konektor saat menyambungkan atau memutuskan saluran , dan jangan tarik kabel untuk menghindari kerusakan pada kabel tembaga internal.
3. Saat menyambungkan garis sinyal penulis buku program ( pembaca ) , anda harus mencocokkan simbol panah pada konektor RS422 , perhatikan arah pemasangan konektor, dan sambungkan dengan benar dan hati-hati untuk menghindari kerusakan pada konektor.
4. Saat memulai tekanan hidrolik, pertama-tama kendurkan dan buka baut penyetelan tekanan dari katup pelepas , nyalakan pompa hidrolik saat tekanan nol, lalu kencangkan secara bertahap baut penyetelan tekanan katup pelepas saat pompa hidrolik berputar untuk membuat tekanan sistem naik perlahan , Untuk menghindari kerusakan komponen yang disebabkan oleh start pulsa.
5. Saat menghubungkan dan membongkar pipa hidrolik, Anda harus mengambil alih pipa dengan satu tangan dan memegang pipa dengan tangan lainnya. Ambil alih dan lepaskan pipa secara vertikal. Jangan pasang atau tarik dengan kuat untuk menghindari kerusakan pada sambungan dan seal oli.
6. Harus
memperhatikan apakah jumlah oli
sudah mencukupi? Temperatur
oli dan tekanan oli terlalu tinggi ( tidak
melebihi dan kgf
/ cm 2 ) ?![]()
7. Setelah sirkuit hidrolik dan listrik terhubung, masuk ke program PLC , hidupkan sumber tekanan dan sakelar sirkuit, alihkan ke mode RUN untuk menjalankan program, dan tekan tombol start untuk memulai sirkuit.
8. Jika masih tidak ada daya setelah dinyalakan, periksa apakah sakelar yang kelebihan beban telah putus atau sekring terbakar? Saat mengganti sekring, matikan daya terlebih dahulu dan hilangkan penyebab korsleting sebelum menyalakan kembali daya.
9. Pengkabelan rangkaian PLC hanya perlu menghubungkan bagian I / O ( input / output, terminal X dan terminal Y ) , dan rangkaian logika lainnya dijalankan dengan simulasi program.
10. The sinyal input dari PLC semua harus menjadi ( biasanya terbuka, NO) masukan kontak , yang b aksi kontak di sirkuit kontrol semua masukan ke terminal masukan oleh sebuah komponen kontak, dan kemudian b aksi kontak dilakukan oleh program internal Kontrol analog.
11. Setelah semua operasi selesai, sumber hidrolik dan catu daya harus dimatikan, semua pengaturan tekanan harus diminimalkan, silinder hidrolik harus dikembalikan ke posisinya, dan tekanan sisa dalam pipa dan komponen harus dihilangkan, dan komponen hidrolik, jaringan pipa, penulis program dan kabel listrik harus dikumpulkan , Bersihkan noda oli di mesin dan tanah, dan isi formulir catatan penggunaan.
°@
6-3 Sirkuit dasar
6-3-1°@Loop kontrol tangga langkah katup solenoid tunggal
1. Tujuan latihan: untuk memahami fungsi solenoid valve tunggal dengan program step ladder untuk kontrol step ladder.
2. Gunakan sirkuit dan program:

I / Oįtłm: X0:
PB.A / X1: PB.B
Y0: SOL.A
°@
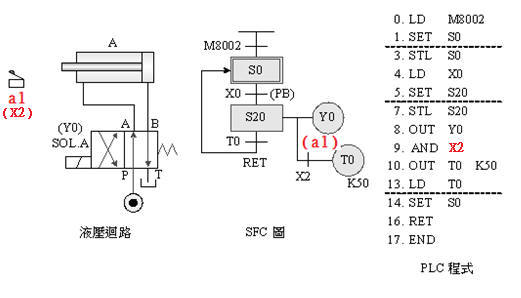
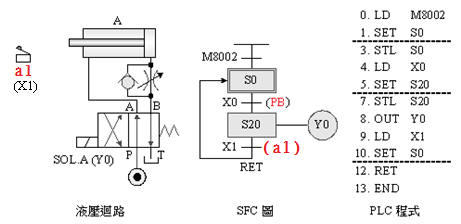
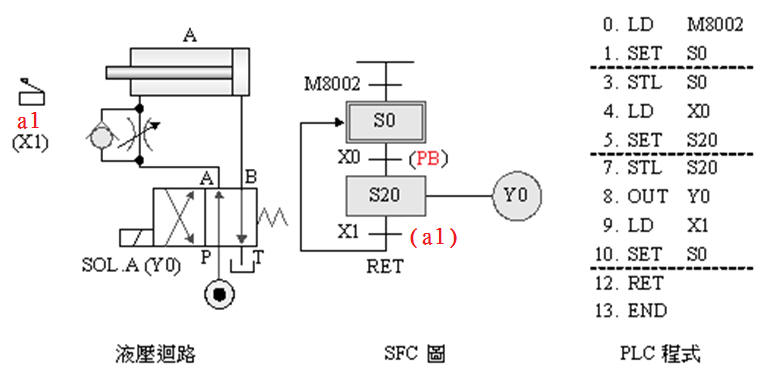
6-3-2°@Single solenoid valve loop kontrol reciprocating tunggal
1. Tujuan latihan: untuk memahami fungsi dari kontrol arah bolak-balik katup solenoid tunggal.
2. Gunakan sirkuit dan program:
I / Oįtłm: X0:
PB.A / X1: a1 / X2: PB.B
Y0: SOL.A
°@
°@
6-3-3 Kontrol waktu silinder hidrolik solenoid valve tunggal
1. Tujuan latihan: untuk memahami fungsi katup solenoid tunggal dengan program tangga langkah untuk mengontrol tindakan waktu silinder hidrolik.
2. Gunakan sirkuit dan program:
A. katup kontrol tindakan silinder hidrolik waktu Tunggal solenoid -1
Konfigurasi I
/ O : X0:
PB / X2: a1
Y0: SOL.A
°@
B. Kontrol aksi waktu silinder hidrolik solenoid valve tunggal -2

Konfigurasi I
/ O : X0:
PB / X1: a1
Y0: SOL.A
°@
6-3-4°@Katup solenoid tunggal loop kontrol bolak- balik kontinu
1. Tujuan latihan: untuk memahami fungsi katup solenoid tunggal dengan sakelar batas untuk kontrol bolak-balik kontinu.
2. Gunakan sirkuit dan program:
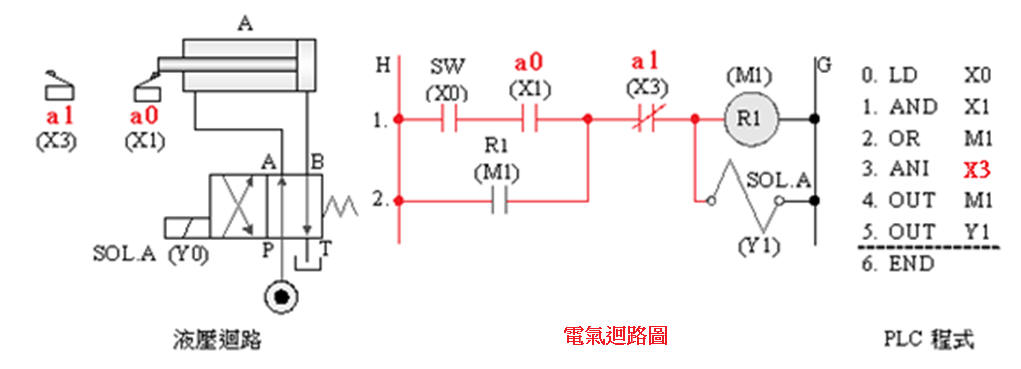
Alokasi I
/ O : X0:
SW / X1: a0 / X3: a1
Y1: SOL.A
°@
6-3-5 Putaran°@kontrol tangga katup solenoid ganda
1. Tujuan latihan: memahami fungsi kontrol arah tangga langkah katup solenoid ganda.
2. Gunakan sirkuit dan program:
I / Oįtłm: X1:
PB.A / X2: PB.B / X3: EMS-PB.3
Y1: SOL.A + / Y2: SOL.A -
°@
6-3-6°@Katup solenoid ganda setelah loop kontrol arah bolak- balik
1. Tujuan latihan: untuk memahami fungsi katup solenoida ganda sebagai kontrol bolak-balik satu kali silinder hidrolik.
2. Gunakan sirkuit dan program:
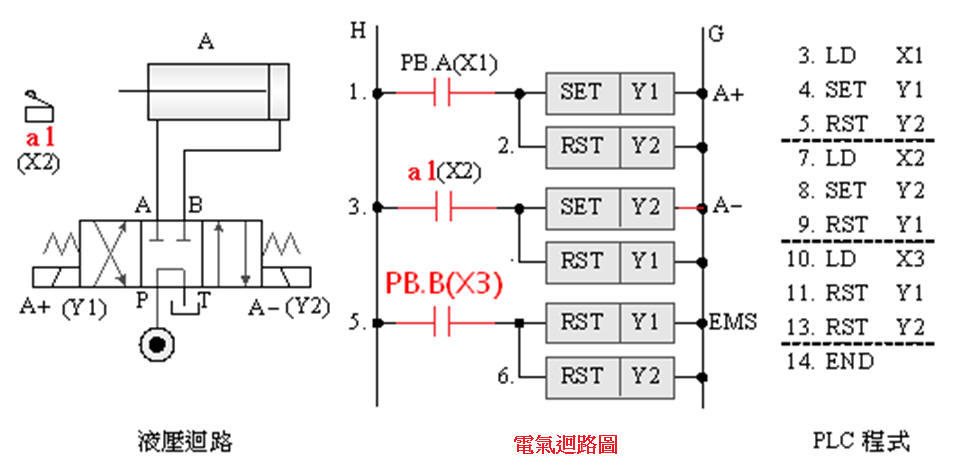
I / Oįtłm: X1:
PB.A / X2: a1 / X3: EMS-PB.B
Y1: SOL.A + / Y2: SOL.A -
°@
6-3-7°@Loop kontrol timing katup solenoid ganda
1. Tujuan latihan: untuk memahami fungsi katup solenoid ganda dengan program tangga langkah untuk mengontrol aksi waktu silinder hidrolik.
2. Gunakan sirkuit dan program:

Konfigurasi I
/ O : X0:
PB / X4: A0 / X6: A1
Y1: SOL.A Tasu / Y0:
SOL.A -
6-3-8°@loop kontrol penghitungan katup solenoid ganda
1. Tujuan latihan: memahami fungsi katup solenoid ganda sebagai pengatur penghitungan silinder hidrolik.
2. Gunakan sirkuit dan program:
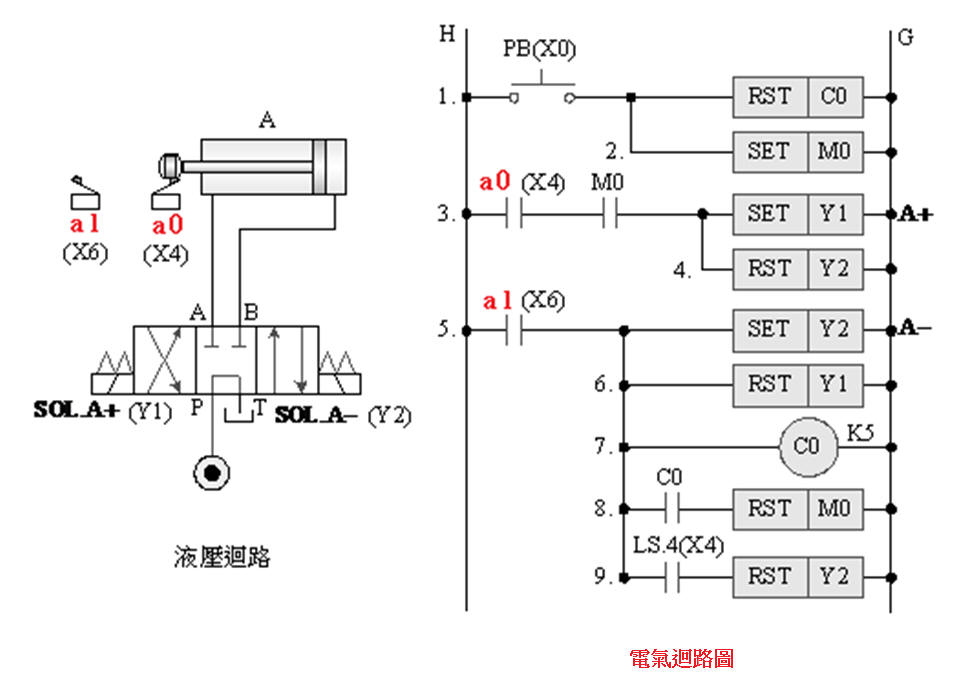

Konfigurasi I
/ O : X0:
PB.A / X4: A0 / X6: A1
Y1: SOL.A Tasu / Y2: SOL.A -
°@
6-3-9°@Katup solenoid tunggal kontrol arah motor hidrolik
1. Tujuan latihan: memahami fungsi solenoid valve tunggal sebagai pengatur arah motor hidrolik.
2. Gunakan sirkuit dan program:
I / Oįtłm: X0:
PB.A / X1: PB.B
Y0: SOL.A
°@
6-3-10°@Kontrol arah motor hidrolik katup solenoid ganda
1. Tujuan latihan: memahami fungsi katup solenoid ganda sebagai pengatur arah motor hidrolik.
2. Gunakan sirkuit dan program:
I / Oįtłm: X0:
PB.A / X1: PB.B / X2: PB.C
Y1: SOL.A + / Y2: SOL.A -
°@
6-3-11°@Sirkuit kontrol kecepatan sub-discharge motor hidrolik
1. Tujuan latihan: untuk memahami fungsi motor hidrolik dengan kontrol kecepatan sub-ventilasi katup throttle.
2. Gunakan sirkuit dan program:


I / Oįtłm: X0:
PB.A / X1: PB.B / X2: PB.C
Y1: SOL.A + / Y2: SOL.A -
°@
6-3-12°@Kontrol arah silinder diferensial
1. Tujuan latihan: untuk memahami fungsi kontrol arah katup solenoid tunggal dan ganda ke silinder diferensial.
2. Gunakan sirkuit dan program:

°@
I / Oįtłm: X0:
PB.A / X1: PB.B / X2: PB.C
Y1: SOL.A + / Y2: SOL.A -
°@
°@
6-3-13°@Sirkuit kontrol sakelar tekanan
1. Tujuan latihan: memahami fungsi katup solenoid ganda dengan sakelar tekanan untuk mengontrol arah silinder hidrolik.
2. Gunakan sirkuit dan program:
Konfigurasi I
/ O : X0:
PB / X1: PS
Y0: SOL.A
°@
6-3-14°@Sirkuit kontrol kecepatan silinder hidrolik
1. Tujuan latihan: memahami fungsi solenoid valve tunggal dengan check throttle valve sebagai pengatur kecepatan silinder hidrolik.
2. Gunakan sirkuit dan program:
A. Mengukur kecepatan
Konfigurasi I
/ O : X0:
PB / X1: a1
Y0: SOL.A
°@
B. Mengukur kecepatan
Konfigurasi I
/ O : X0:
PB / X1: a1
Y0: SOL.A
°@
6-3-15°@Kontra putaran aksi dasar
1. Tujuan latihan: untuk memahami prinsip operasi pencacah built-in PLC dengan kontrol manual .
2. Gunakan sirkuit dan program:

I / Oįtłm: X0:
PB.A / X1: PB.B
Y0: SOL.A
°@
6-3-16°@sirkuit kontrol penghitungan silinder hidrolik
1. Tujuan dari latihan ini: untuk bekerja sama dengan kontrol reciprocating otomatis dari silinder hidrolik untuk memahami prinsip operasi dari penghitung built-in PLC .
2. Gunakan sirkuit dan program:

Alokasi I
/ O : X0:
PB / X1: a0 / X3: a1 Y0:
SOL.A
°@
°@
6-4 Sirkuit aplikasi
°@
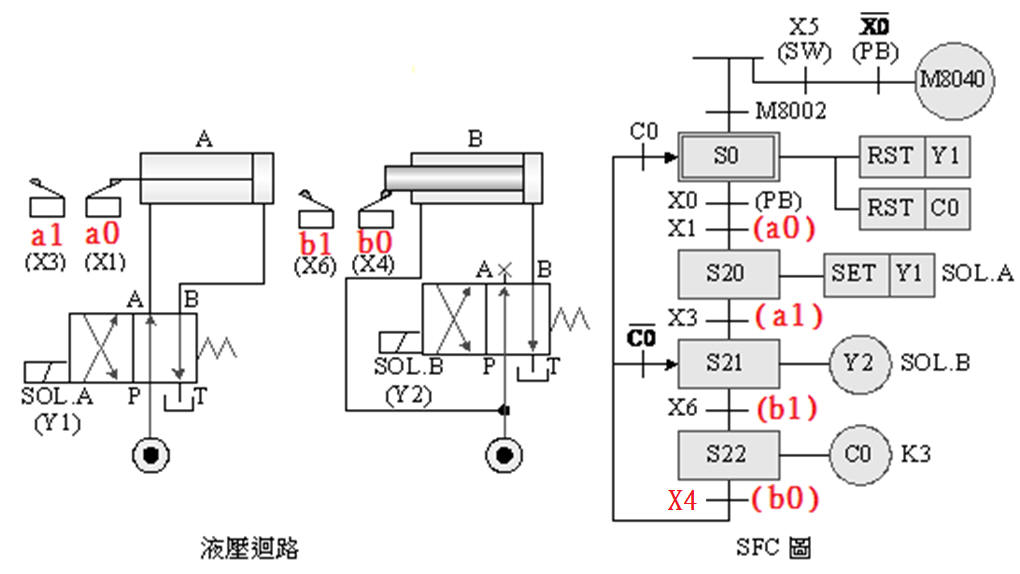
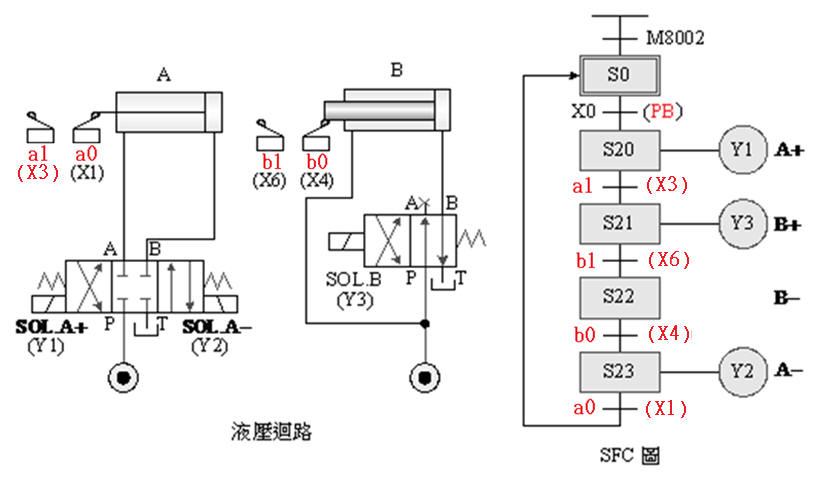
6-4-1°@Sirkuit kontrol urutan katup urutan silinder hidrolik ganda
1. Tujuan latihan: untuk memahami penerapan kontrol sekuensial silinder hidrolik ganda.
2. Gunakan sirkuit dan program:

I / Oįtłm: X0:
PB / X1: a0 / X3: a1 / X4: B0 / X6:
b1
Y1: SOL.A + / Y2: SOL.A -
°@
6-4-2°@Motor hidrolik sirkuit waktu pelepasan beban yang dikontrol secara elektronik
1. Tujuan latihan: memahami penerapan motor hidrolik dalam pelepasan beban yang dikontrol secara elektronik.
2. Gunakan sirkuit dan program:
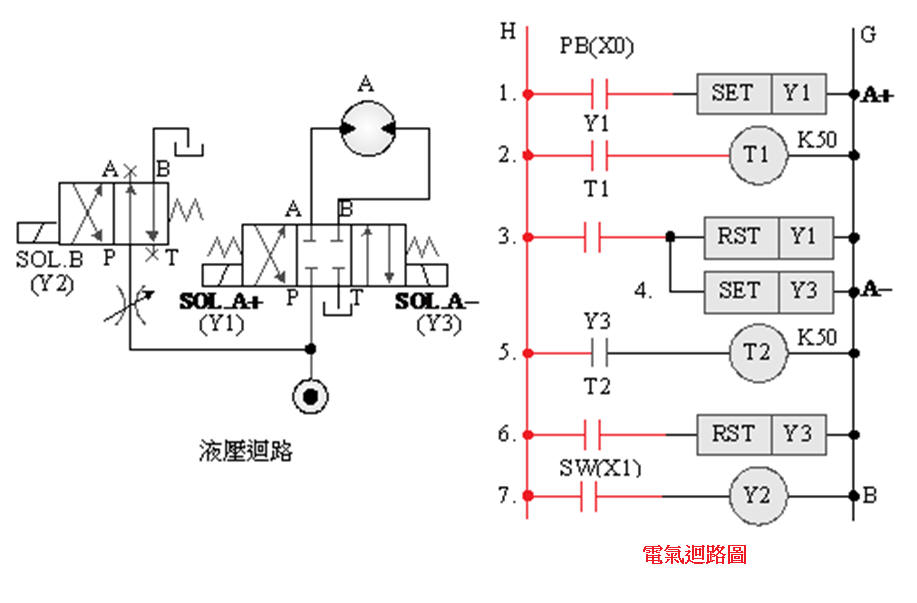
I / O
įtassign°GX0:
PB / X1: SW Y1:
SOL.A + / Y2: SOL.B / Y3: SOL.A -
°@
6-4-3°@Sirkuit kontrol aksi tekanan tinggi dan rendah silinder hidrolik
1. Tujuan latihan: bekerja sama dengan katup pelepas untuk mengontrol gerakan tekanan tinggi dan rendah dari silinder hidrolik.
2. Gunakan sirkuit dan program:

I / Oįtłm: X0:
PB.A / X1: a0 / X3: a1 / X7: PB.B
Y1: SOL.A / Y2: SOL.B
°@
6-4-4°@Silinder hidrolik dan sirkuit kontrol aksi sakelar tekanan motor hidrolik
1. Tujuan dari latihan ini: untuk bekerja sama dengan sakelar tekanan untuk penerapan kontrol aksi sekuensial dari silinder hidrolik dan motor hidrolik.
2. Gunakan sirkuit dan program:

Alokasi I
/ O : X0:
PB / X1: a0 / X2: PS
Y1: SOL.A / Y2: SOL.B
°@
6-4-5°@Sirkuit waktu pelepasan beban manual pompa ganda tekanan tinggi dan rendah
1. Tujuan latihan: untuk memahami penerapan katup solenoid tunggal pada pelepas beban manual pompa ganda bertekanan tinggi dan rendah.
2. Gunakan sirkuit dan program:
I / O
įtregular°GX0:
PB / X5: SW Y1:
SOL.A + / Y2: SOL.A - /
Y3: SOL.B
°@
6-4-6°@Pengurangan tekanan silinder hidrolik ganda dan sirkuit kontrol berhenti darurat
1. Tujuan latihan: untuk memahami penerapan katup pengurang tekanan untuk silinder hidrolik.
2. Gunakan sirkuit dan program:

I / Oįtłm: X0:
PB.A / X1: a0 / X3: a1 / X4: B0 /
X6: b1 / X5: PB.B
Y1: SOL.A + / Y2: SOL.A -
°@
6-4-7°@Loop balik cepat pompa ganda bertekanan tinggi dan rendah
1. Tujuan latihan: untuk memahami penerapan sakelar tekanan dalam pengembalian cepat pompa ganda bertekanan tinggi dan rendah.
2. Gunakan sirkuit dan program:
I / O
įtregular°GX0:
PB / X1: a0 / X2: PS Y1:
SOL.A + / Y2: SOL.B / Y3: SOL.A -
°@
6-4-8°@Mengangkat beban mati penyeimbang tekanan memperlambat loop kontrol geser
1. Tujuan latihan: untuk memahami penerapan katup penyeimbang di sirkuit pengangkat.
2. Gunakan sirkuit dan program:

I / Oįtłm: X0:
PB.A / X1: MS.1 / X2: MS.2 / X3:
MS.3 / X5: PB.B Y1:
SOL.A + / Y2: SOL.A -
6-4-9°@rangkaian kontrol kunci katup periksa pemandu
1. Tujuan latihan: untuk memahami penerapan katup periksa terpandu dalam kontrol kunci beban.
2. Gunakan sirkuit dan program:

I / Oįtłm: X0:
PB.A / X1: MS.1 / X2: MS.2 / X3:
MS.3 / X5: EMS PB.B
Y1: SOL.A + / Y2: SOL.A -
°@
6-4-10 Silinder hidrolik, aksi waktu motor hidrolik, sirkuit kontrol kembali berhenti darurat
1. Tujuan latihan: untuk memahami penerapan silinder hidrolik, tindakan timing motor hidrolik, kontrol pengembalian berhenti darurat.
2. Gunakan sirkuit dan program:
I / Oįtłm: X0:
PB.A / X1: a0 / X3: a1 / X5: EMS-PB.B
Y1: SOL.A / Y2: SOL.B
°@
6-4-11°@Penghitungan silinder hidrolik ganda dan sirkuit kontrol loncatan
1. Tujuan latihan: untuk memahami penerapan silinder hidrolik ganda untuk kontrol tindakan sekuensial.
2. Gunakan sirkuit dan program:
I / Oįtassign
°GX0:
PB / X1: a0 / X3: a1 / X4: b0 / X6:
b1 / X5: SW Y1:
SOL.A / Y2: SOL.B
6-4-12°@Sirkuit kontrol kecepatan dua tahap silinder hidrolik
1. Tujuan latihan: untuk memahami penerapan kontrol kecepatan multi-tahap dengan rangkaian katup solenoid ganda.
2. Gunakan sirkuit dan program:
A. Lewati kontrol kecepatan dua tahap

I / Oįtłm: X0:
PB.A / X1: a0 / X2: a1 / X3: a2 /
X4: PB.B
Y1: SOL.A + / Y2: SOL.B / Y3: SOL.A -
°@
B._ Kontrol kecepatan dua tahap pompa ganda tekanan tinggi dan rendah
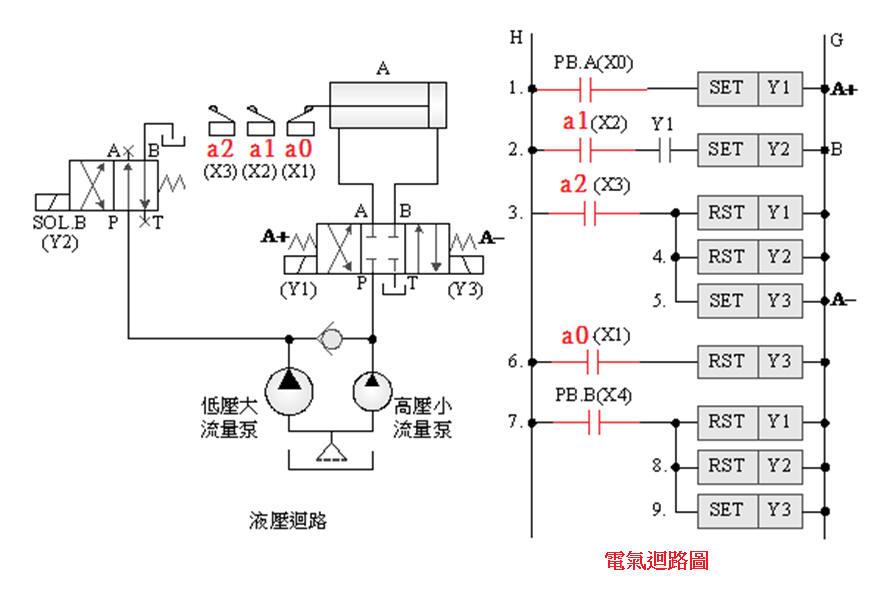

I / Oįtłm: X0:
PB.A / X1: a0 / X2: a1 / X3: a2 /
X4: PB.B
Y1: SOL.A + / Y2: SOL.B / Y3: SOL.A -
°@
6-4-13°@Loop kontrol aksi multi-tahap katup solenoid ganda
1. Tujuan latihan: untuk memahami penerapan kontrol aksi multi-tahap dari loop katup solenoid ganda.
2. Gunakan sirkuit dan program:

I / Oįtłm: X0 : PB.A
/ X1: a0 / X2: a1 / X3: a2 / X7:
PB.B Y1:
SOL.A / Y2: SOL.B
°@
6-4-14°@loop kontrol muka silinder diferensial inci
1. Tujuan magang: untuk memahami penerapan katup magnetik tunggal dan ganda untuk kontrol muka silinder diferensial inci.
2. Gunakan sirkuit dan program:
I / O
įtregular°GX0:
PB / X1: a0 / X2: SW Y1:
SOL.A + / Y0: SOL.A -
°@
6-4-15°@Sirkuit kontrol intermiten motor hidrolik
1. Tujuan magang: untuk memahami penerapan katup solenoid tunggal dan ganda untuk kontrol intermiten motor hidrolik.
2. Gunakan sirkuit dan program:
°@
I / O
įtregular°G X0:
PB / X2: SW Y0:
SOL.A + / Y1: SOL.A -
°@
6-4-16°@Sirkuit kontrol urutan perlindungan diri silinder hidrolik ganda
1. Tujuan latihan: untuk memahami penerapan kontrol sekuensial silinder hidrolik ganda.
2. Gunakan sirkuit dan program:

I / Oįtłm: X0:
PB.A / X1: a0 / X2: PB.B / X3: a1 /
X6: b1 /
Y1: SOL.A + / Y2: SOL.B / Y3: SOL.A -
°@
6-4-17°@Sirkuit kontrol urutan perintah tangga silinder hidrolik ganda
1. Tujuan latihan: untuk memahami penerapan kontrol sekuensial silinder hidrolik ganda.
2. Gunakan sirkuit dan program:
I / O
įtassign°GX0:
PB / X1: a0 / X3: a1 / X4: b0 / X6:
b1 Y1:
SOL.A + / Y2: SOL.A - /
Y3: SOL.B
°@
6-4-18°@Tangga langkah silinder hidrolik ganda memerintahkan sirkuit kontrol muka umum
1. Tujuan magang: untuk memahami penerapan kontrol paralel silinder hidrolik ganda.
2. Gunakan sirkuit dan program:
I / Oįtłm: X0:
PB.A / X1: a0 / X3: a1 / X6: b1 /
X7: PB.B
Y1: SOL.A / Y2: SOL.B
°@
6-4-19°@Silinder hidrolik ganda mencapai sirkuit kontrol secara bersamaan
1. Tujuan latihan: untuk memahami penerapan kedatangan simultan dan kontrol paralel silinder hidrolik ganda.
2. Gunakan sirkuit dan program:

Konfigurasi I
/ O : X0:
PB.A / X1: a0 / X3: a1 / X4: b0 /
X6: b1 / X5:
PB.B Y1:
SOL.A + / Y2: GL ( lampu
hijau )
/ Y3: RL ( merah
lampu )
/ Y4:
YL ( kuning )
/ Y6: SOL.A -
°@
INDEX:
[1] Waktu - Stroke grafik: grafik . Menunjukkan keadaan aksi silinder udara Dalam gambar, sumbu horizontal adalah waktu, sumbu vertikal adalah stroke, dan lereng adalah kecepatan.
A ke Aslow A + A ++ - Aslow - misalnya, silinder- B kembali memperlambat fast, time - stroke legend adalah sebagai berikut:
°@
