¡@
Praktik kontrol pneumatik & hidraulik
¡@
BAB 1 KONTROL PNEUMATIK TRADISIONAL
¡@
1-1 Kata pengantar
¡@
Kontrol Pneumatik tradisional menggunakan komponen kontrol Pneumatik umum untuk mengontrol tekanan, Arah, dan Laju aliran Pnenumatic terkompresi yang disediakan oleh Kompresor Pnenumatik , dan kemudian menyesuaikan tekanan setelah terakumulasi, waktu, menghitung atau memproses untuk vakum dengan komponen tambahan Pnenumatic terkompresi dikirim ke silinder pneumatik, motor pneumatik, silinder rotary pneumatik, atau cangkir hisap vakum dan komponen tindakan pneumatik lainnya, yang digunakan sebagai output dari sistem untuk menyediakan daya untuk mesin pengolahan atau sistem otomatisasi industri.
¡@
Katup kontrol tekanan 1-1.1 (Katup kontrol tekanan)
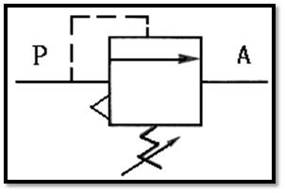
101 katup urutan: itu adalah katup Normal Closed (NC), dan ketika tidak bergerak, ada katup ditutup ; ketika tekanan masuk lebih besar dari nilai pengaturan pegas penyesuaian, katup terbuka.

¡@
¡@
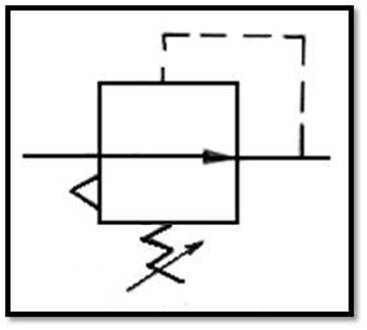
102 Katup pengurang tekanan: Sayat adalah katup Normal Terbuka(NO). Ketika tidak di aktuasi, katup terbuka. Penurunan tekanan tekanan sekunder outlet dapat diatur dengan menyesuaikan tekanan menyesuaikan pegas.
¡@

¡@
¡@
103 Tiriskan katup: Ini adalah normal tertutup (NC) katup. Ketika tidak beroperasi, Hal ini ditutup; ketika tekanan masuk lebih besar dari nilai pengaturan pegas menyesuaikan, katup terbuka dan tekanan dilepaskan. Hal ini sering digunakan untuk pengaturan tekanan keselamatan sistem.

http://www.aliexpress.com/popular/manual-relief-valve.html
104 saklar tekanan: Ini adalah elemen konversi pneumatik-listrik. Ketika tidak diaktifkan, sirkuit c-b on dan c-a off ; ketika tekanan inlet lebih tinggi dari nilai pengaturan pegas penyesuaian, sirkuit beralih ke c-a on dan c-b off.
¡@
1-1.2 Katup kontrol direction ( Direction control valve)
Metode operasi:


¡@
¡@
¡@
201 Dua-port dua posisi (2/2) Directional valve: Ini memiliki dua bentuk: Biasanya Terbuka (TIDAK) dan Biasanya Ditutup (NC) . Hal ini sering digunakan untuk mengontrol pembukaan atau penutupan pipa Pnenumatic.
¡@
¡@
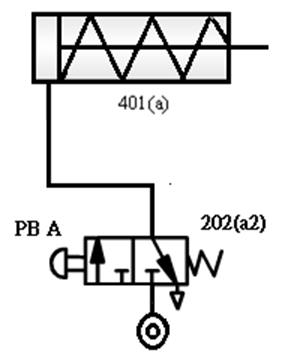
202 Tiga-port dua posisi (3/2) Directional valve: Ini memiliki dua jenis Normal Open(NO) (NO) dan Normally Closed(NC) (NC) . Hal ini sering digunakan untuk mengontrol silinder single-acting atau motor pneumatik single-acting. Hal ini juga dapat digunakan untuk mengontrol pembukaan atau dekompresi garis pneumatik.
¡@
¡@
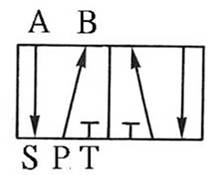
203 lima-port dua posisi (5/5) Directional valve: elemen kontrol directional, sering digunakan untuk kontrol silinder pneumatik double-acting atau motor pneumatik double-acting. Hal ini juga dapat digunakan untuk desain kaskade katup kembali untuk tujuan mengubah panggung. Perbedaan antara drive kanan dan drive kiri mirip antara peraturan Eropa dan Amerika. Ada juga perbedaan antara posisi kiri P ¡÷ B lulus, posisi kanan P ¡÷ A lulus, posisi kiri P ¡÷ A lulus, dan posisi kanan P ¡÷ B lulus.
¡@
204 lima-port tiga posisi Directional valve: Direcelemen kontrol tional, sering digunakanuntuk kontrol silinder pneumatik double-acting atau motor pneumatik double-acting; tergantung pada persyaratan kontrol, ia memiliki kunci shut-off netral, tekanan knalpot netral dan posisi netral Bentuk yang berbeda seperti asupan Pnenumatic bilateral.
¡@
205 katup cek: juga dikenal sebagai katup cek. Ini adalah katup satu arah dengan jalur maju dan tidak ada Arah terbalik. Hal ini sering digunakan untuk mencegah kembali Aliran, kunci tekanan, atau digunakan dengan katup kontrol untuk membangun jalur bypass; jika ada sesekali terbalik Untuk persyaratan akses, katup pemeriksaan pilot dapat digunakan untuk membukanya dengan tekanan pilot.
¡@

¡@
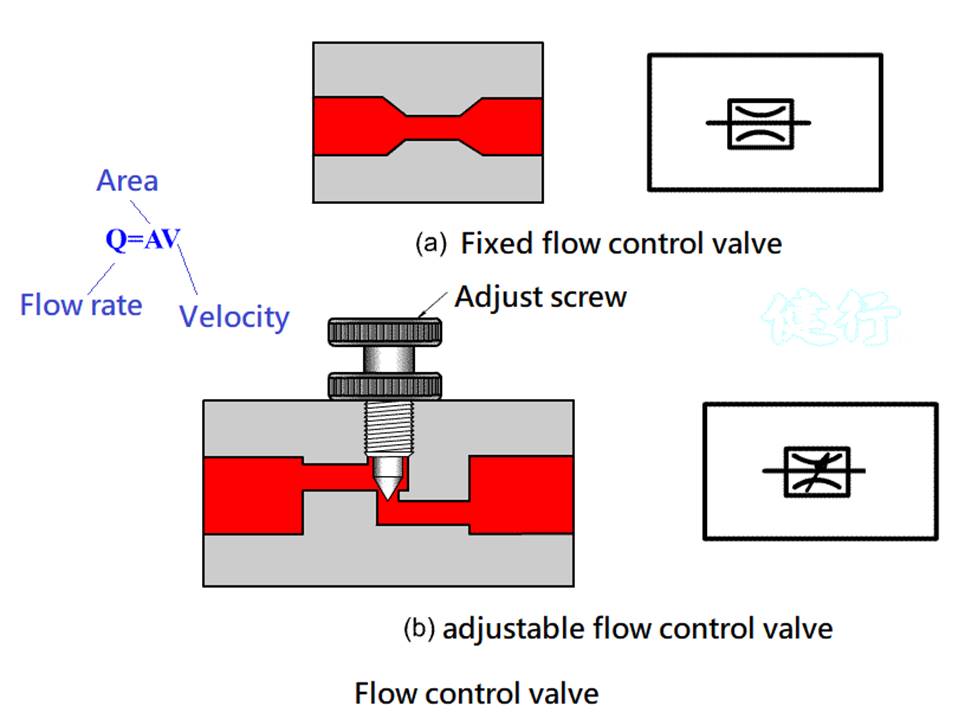
1-1.3 Katup kontrol aliran
301 Throttle Valve: Kurangi area saluran Flow dan sesuaikan Aliran Pnenumatic untuk mencapai tujuan menyesuaikan kecepatan aktuator.
¡@
Katup STOP 302: juga dikenal sebagai katup on-off, yang mengontrol pembukaan dan penutupan saluran Flow.
¡@


http://www.hj-hg.com.tw/product-detail-208439.html
¡@
303 dilengkapi dengan katup throttle cek: juga dikenal sebagai flow regulator (FR), untuk regulasi kecepatan satu arah.
¡@
¡@
¡@
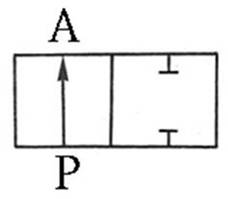
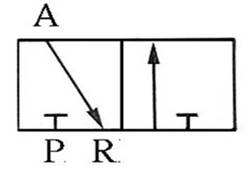
304 Katup knalpot cepat: Pneumatik P memasuki A keluar, A memasuki R keluar (knalpot) ; Port dipasang di port knalpot aktuator untuk menyediakan jalur knalpot cepat untuk meningkatkan kecepatan aktuator.

¡@
¡@
1-1.4 aktuator pneumatik
¡@
401 Silinder Pnenumatik: Piston didorong oleh Pneumatik, yang mengubah energi Pneumatik menjadi mendorong dan menarik komponen energi mekanis.
¡@
¡@

¡@
¡@
¡@
¡@
¡@
402 Pneumatic Motor: Komponen yang mengubah energi Pneumatik menjadi energi mekanis berputar terus menerus.
¡@
403 rotary cylinder: also known as a rotary cylinder , a component that converts Pneumatic energy into a fixed-angle rotating mechanical energy.
¡@
http://www.68jd.com/biz/2009522/55587.html
¡@
1-1.5 elemen tambahan
¡@
501 Pneumatic Source : Menyediakan Pnenumatic terkompresi sebagai kekuatan pendorong untuk pengoperasian sistem Pneumatik.
¡@
¡@
502 Pnenumatic Recervoir / Akumulator: Reservoir multi-Pnenumatic untuk menyimpan Pnenumatic terkompresi disampaikan ke kompresor; digunakan untuk Menstabilkan,suplemen Aliran dan bertindak sebagai sumber tekanan sementara.
¡@

¡@
¡@
503 Pressure Gauge : Berdasarkan prinsip tabung Bourdon, menampilkan nilai tekanan dalam sistem.
¡@
¡@
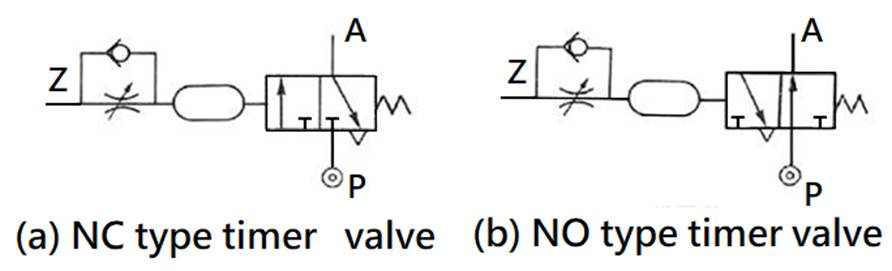
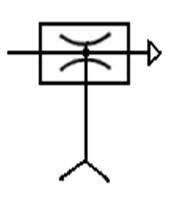
504 Timing valve (TIMER): , tekanan panduan menggunakan prinsip throttling dan pnenumatic chamber charging untuk mencapai tujuan aktuasi waktu. Ini memiliki dua mode kontrol: aktuasi waktu dan pengaturan waktu, Ada dua jenis tindakan, serta Normal Closed(NC) dan biasanya Open(NO).
katup waktu aktuasi waktu
.
¡@
Pengaturan waktu TANPA katup waktu
SIMBOL CNS
¡@
¡@
505 Pneumatik Pipa: Fitting pipa adalah untuk menyampaikan Pneumatik, di samping perbedaan dalam bahan dan ukuran, dibagi menjadi pipa keras dan selang.
¡@
¡@
506 kombinasi tiga bagian (kombinasi FRL): Komponen pengkondisian pnenumatik, termasuk Filter, Regulator tekanan, dan Lubricator secara berurutan, juga dikenal sebagai kombinasi tiga titik.
¡@
¡@
¡@
507 Menghitung katup (Counter) : Menggunakan on / off dari input pilot Pneumatic untuk menghitung kali. Ketika on / off kali mencapai nilai yang ditetapkan, penyihir katup; di mana P adalah inlet Pnenumatic tekanan, A adalah outlet Pneumatik, dan C (Z ) Adalah terminal penghitungan, R (Y) adalah terminal Pneumatic zero return (RESET), dan RST adalah manual zero return.
¡@
Penghitung tipe decrement (-) Increment (+)
508 tekanan increaser:menerapkan tekanan ke piston besar untuk mendorong piston kecil, dan menggunakan karakteristik bahwa tekanan berbanding terbalik dengan daerah piston untuk mencapai tujuan meningkatkan.
¡@
¡@
¡@
¡@
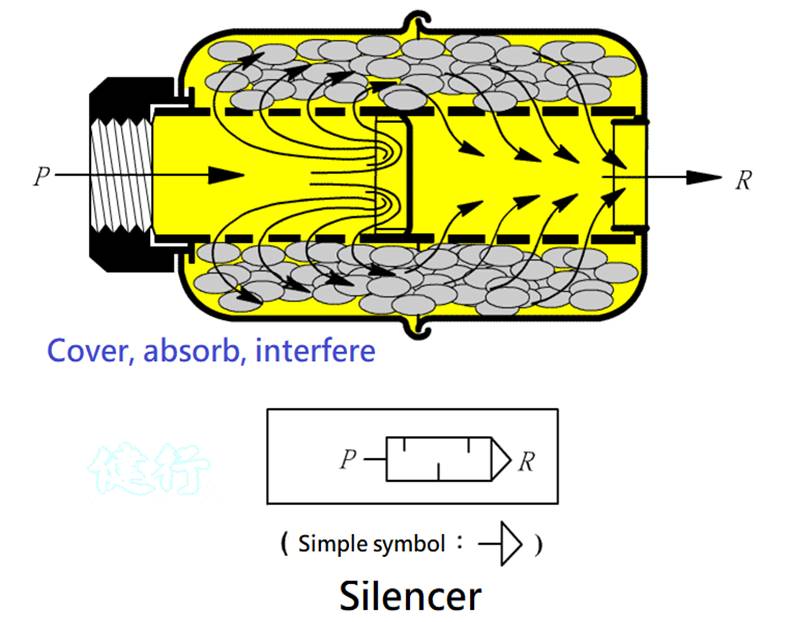
509 peredam suara: dipasang di port knalpot komponen pneumatik, untuk mencapai tujuan keheningan dengan penutup, penyerapan dan gangguan.
¡@


Shako (Di dekat Shako)
https://www.shako.com.tw/webls-zh-tw/accessories/09.htm
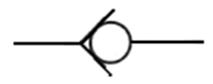
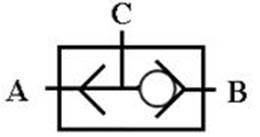
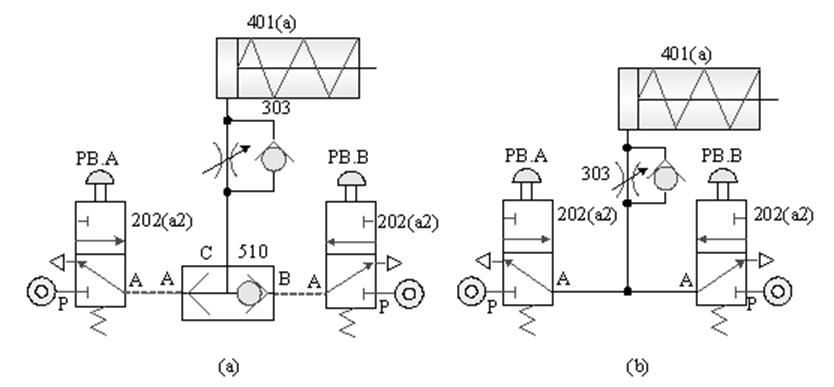
510 katup shuttle: logis ATAU , C = A + B ; ketika ada input tekanan di kedua ujung A dan B , ada output tekanan pada akhir C.
¡@
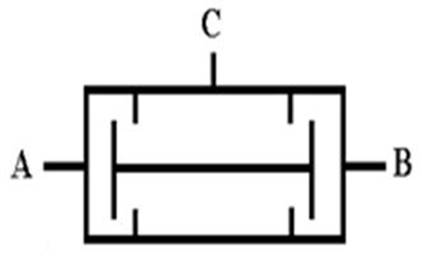
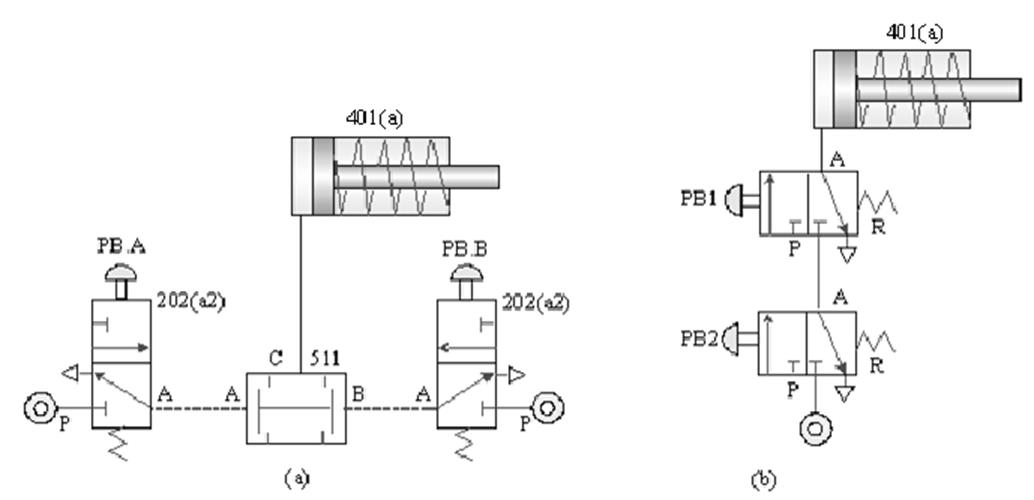
51 1 Katup tekanan ganda: logis DAN, C = A ¡Ñ B ; ketika kedua ujung A dan B memiliki input tekanan, ada output tekanan pada akhir C.
¡@
512 vacuum generator: Hal ini didorong oleh Pnenumatic terkompresi menggunakan prinsip venturi. Ketika Pneumatik Mengalir melalui nosel, laju aliran meningkat, dan hisap dihasilkan pada pembukaan karena perbedaan tekanan. Umumnya, dapat menghasilkan tekanan vakum sekitar puluhan KPa ( beberapa persepuluh bar) .
¡@
¡@
¡@
¡@
¡@
1. Operasi harus didahului oleh semua katup kontrol Aliran ke minimum; katup tunda, katup nol hitungan; dan periksa apakah ada air di dalam mangkuk FRL, jika baut melonggarkan bagian bawah cangkir drain, dan tekanan disesuaikan 3~ 8KGf / cm 2 .
2. Ketika menghubungkan sirkuit, sumber tekanan harus ditutup untuk mencegah sejumlah besar kebocoran Pnenumatic atau pipa berayun dan menyakiti orang.
3. Ketika merakit dan membongkar tabung pneumatik, tekan ke bawah sambungan cepat-putus sebelum menariknya keluar . Dalam kasus pipa baru atau bersama dengan gigitan ketat, tidak mudah untuk menarik keluar sambungan rilis cepat dengan menekan ke bawah. Dorong tabung Pnenumatic ke depan untuk melepaskan gigi terbalik sebelum mengeluarkan tabung Pnenumatic. Jangan menarik keras untuk menghindari kerusakan pada dinding tabung Pnenumatic dan sendi. .
4. Setelah menghubungkan sirkuit, periksa apakah semua konektor terhubung dengan benar sebelum menyalakan sumber Pneumatik untuk mencegah pipa tersandung ketika tekanan terhubung.
5. Komponen yang tidak terpakai dan tabung Pneumatik pada mesin harus ditempatkan dengan benar dan tidak jatuh ke tanah.
6. Jangan meniup Pneumatik kepada orang lain, sehingga untuk menghindari cedera yang disebabkan oleh Pneumatik atau kotoran dalam pneumatik.
7. Garis padat dan putus-putus di sirkuit adalah pipa pneumatik. Secara umum, garis padat adalah tekanan operasi, dan garis putus-putus adalah tekanan pilot. Ketika dua baris berpotongan dan tidak tersambung, pemrosesan lintas baris tidak dilakukan. Jika mereka terhubung, persimpangan ditunjukkan oleh titik.
8. Saat merakit katup kontrol, pastikan posisi inlet dan outlet masing-masing katup, dan tandai perpipaan sesuai dengan Arah panah atau ujung input tekanan ( P) , output end ( A, B) , tekanan pilot ( X , Y), dll, sehingga menghindari koneksi yang salah. Ini memiliki fungsi; jika katup kontrol bocor banyak ketika tekanan dihidupkan, sebagian besar disebabkan oleh koneksi balik saluran masuk dan saluran keluar.
9 tahun ke atas. Saat merakit aktuator, konfirmasikan arah perpanjangan silinder pneumatik, saluran masuk dan outlet motor pneumatik atau silinder putar, port output tekanan normal katup kontrol Directional dan posisi pemasangan katup rol (katup rol ganda dipasang pada stroke silinder pneumatik Pada akhirnya, posisi pemasangan katup rol tunggal harus dipindahkan ke dalam ) dan arah kontak katup rol (roller ada di luar) .
10. Rakitan cara throttle valve saat bypass check confirmation opening Direction, speed control loop memang mengerti cara intake throttle ( diukur menjadi, Meter in) atau exhaust throttle ( diukur keluar, Meter OUT) .
11. Jika ada gerakan atau situasi abnormal, segera tekan tombol emergency s (EMS) atau matikan sumber Pneumatik, lalu nyalakan lagi setelah menghilangkan situasi abnormal.
12. Setelah sirkuit terhubung, tekanan harus dimulai setelah mengkonfirmasikan bahwa tidak ada hambatan pada stroke silinder pneumatik; jangan s atau menempatkan objek dalam stroke silinder pneumatik untuk menghindari bahaya atau kerusakan selama operasi.
13. Setelah memulai sirkuit, Anda harus mengikuti langkah-langkah operasi dan merekam status operasi satu per satu. Jika sistem tidak beroperasi sama sekali atau tidak beroperasi dengan benar, Anda dapat mematikan tekanan dan memeriksa sirkuit Pneumatik dan tindakan pencegahan tersebut untuk mengetahui kesalahan dan menghilangkan hambatan. Setelah melepas rintangan, restart sirkuit start tekanan lagi.
14. Setelah semua magang selesai, sumber Pneumatik harus dimatikan, pipa dan komponen harus dikumpulkan, permukaan kerja harus dibersihkan, dan formulir catatan penggunaan harus diisi.
¡@
¡@
1-3 Sirkuit dasar
Tujuan praktik: untuk memahami karakteristik filtrasi gabungan tiga titik, regulasi tekanan dan pelumasan .
Tujuan praktik: untuk memahami kontrol gerakan silinder tunggal.
A. Direct kontrol
B. Dalam kontrol tekanan langsung
Tujuan latihan: untuk memahami cara beralih Arah silinder pneumatik dua kali bertindak dengan katup tombol.
A. Manual silinder batang tunggal Sirkuit operasi langsung
B. Double rod silinder manual Sirkuit operasi langsung
C. (Dalam 200 Tekanan percontohan pulsa silinder dua kali lipat dalam loop kontrol langsung
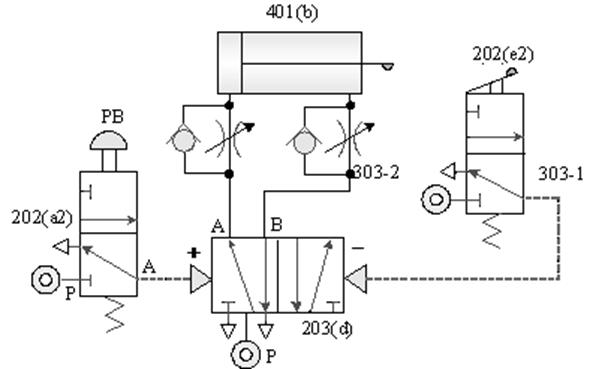
Tujuan praktik: untuk memahami peran tekanan pilot dan pengalihan Arah silinder pneumatik oleh katup tiga posisi lima port.
A. 5/3 Direckatup stasioner waveguide loop kontrol tekanan
B. 5/3 Directional valve pulse pressure control circuit ( Perlindungan diri pneumatik )
C. 3/2 Tekananwaveguide stasioner katup direc tional dalam loop kontrol langsung
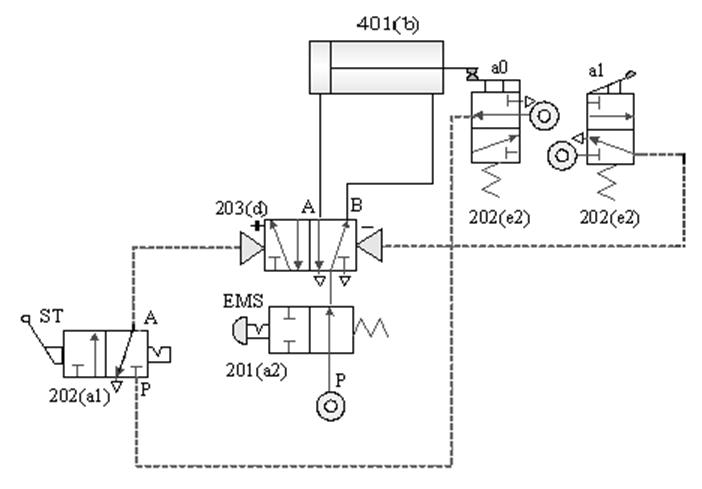
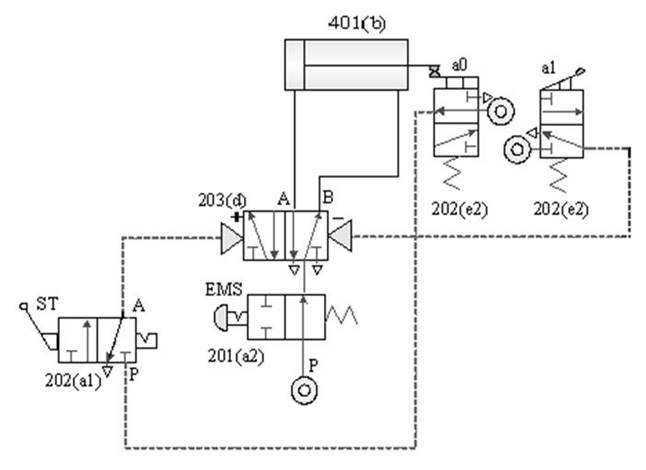
Tujuan praktek: untuk memahami penerapan kontrol darurat silinder pneumatik.
A. A. Setelah menekan keadaan darurat, terus operasikan sirkuit setelah keadaan darurat dilepaskan
B. (Dalam 199 Darurat kembali ke loop setelah menekan
Tujuan magang: untuk memahami prinsip kontrol kecepatan dengan katup throttle cek.
A. A. Kontrol manual silinder sekali jalan
B. (Dalam 199 Sirkuit kontrol kecepatan silinder dua kali lipat
C. (Dalam 200 Sirkuit kontrol kecepatan reciprocating silinder reciprocating ganda
D. D. (Dalam 2 Ganda-bertindak silinder otomatis reciprocating sirkuit kontrol kecepatan
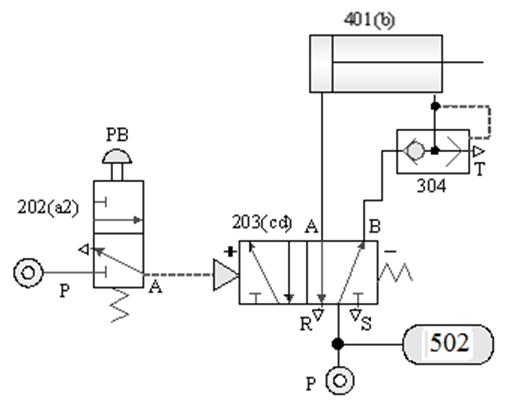
Tujuan magang: untuk memahami prinsip operasi peningkatan kecepatan katup knalpot yang cepat.
Tujuan magang: untuk memahami karakteristik operasi katup urutan.
Tujuan latihan: untuk memahami penerapan katup waktu tindakan waktu dalam pengembalian tertunda.
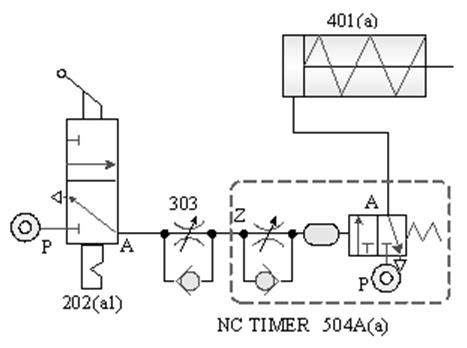
Tujuan magang: untuk memahami prinsip operasi katup penundaan.
2. Gunakan peralatan dan sirkuit:
¡@
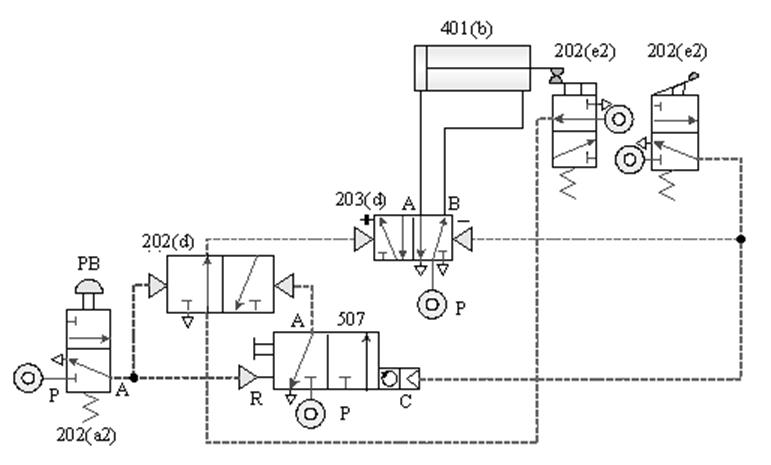
Tujuan praktik: untuk memahami kontrol penghitungan silinder pneumatik.
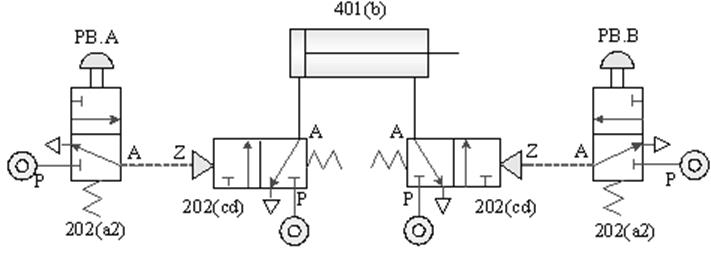
Tujuan latihan: untuk memahami karakteristik pengoperasian seri dan sirkuit paralel.
A. Seri kontrol ---DAN sirkuit
B. Kontrol paralel ---OR loop
Tujuan latihan: untuk memahami cara menggunakan katup pemeriksaan pilot untuk mengunci silinder beban.
Tujuan magang: untuk memahami cara menyeimbangkan silinder beban dengan katup pengurang tekanan bilateral.
Tujuan magang: untuk memahami karakteristik operasi generator vakum.
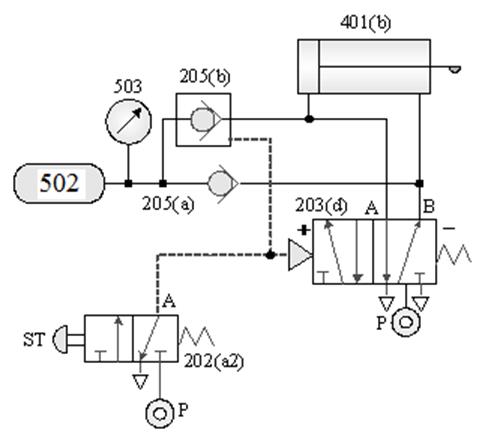
Tujuan praktik: untuk memahami cara mengisi akumulator tekanan untuk membuat silinder pneumatik menghasilkan tindakan dampak.
¡@
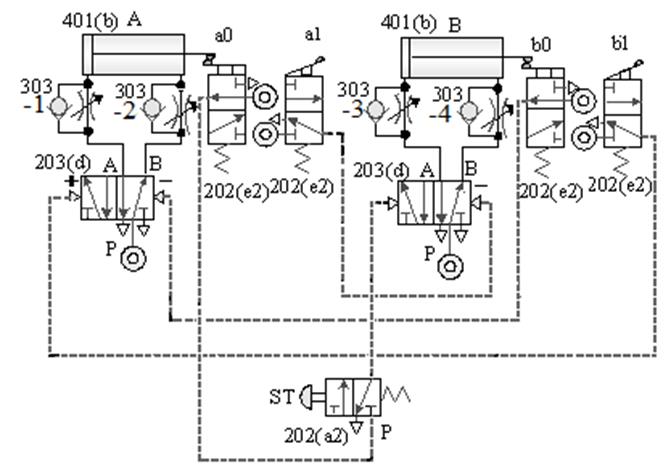
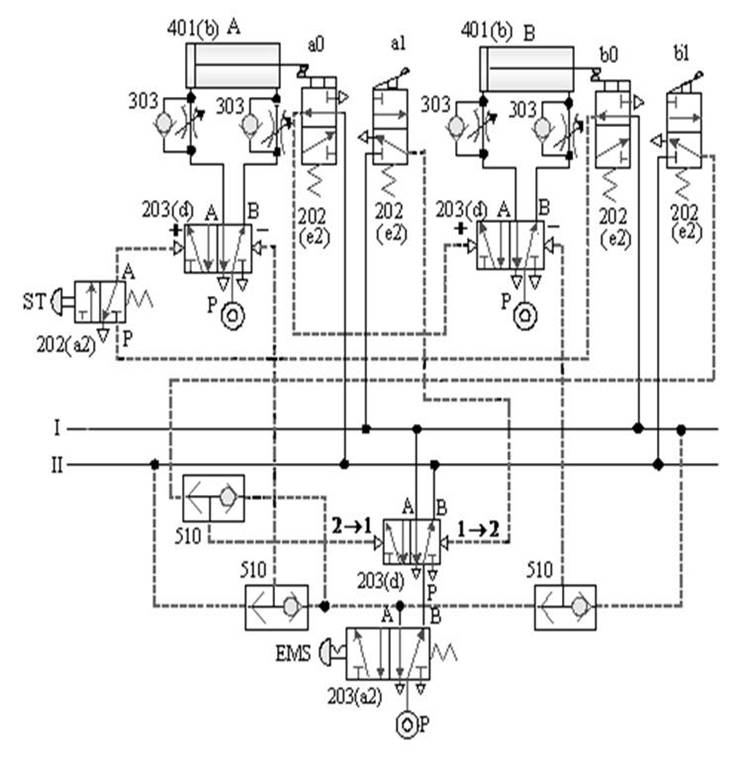
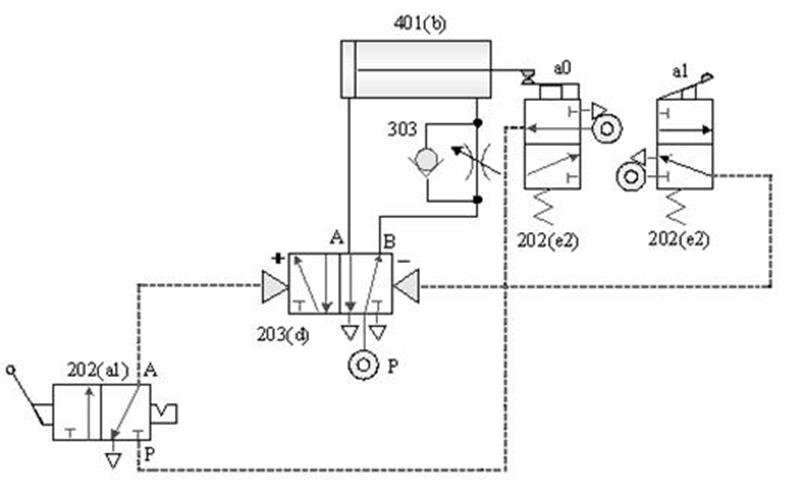
Tujuan praktik: Dua silinder pneumatik bekerja sama dengan katup rol dan katup pilot untuk tindakan berurutan.
A. A. Sirkuit aksi berurutan silinder ganda
B. (Dalam 199 Sirkuit aksi urutan silinder ganda
C. (Dalam 200 Sirkuit aksi berurutan tiga silinder
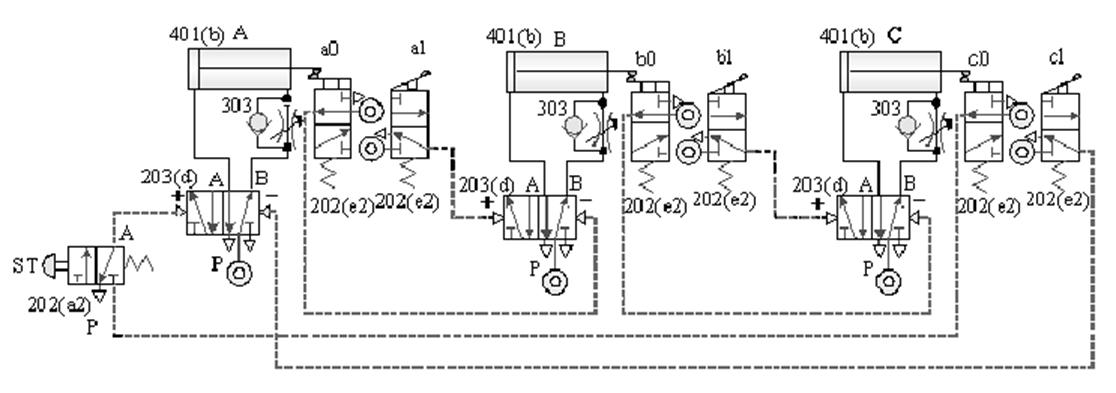
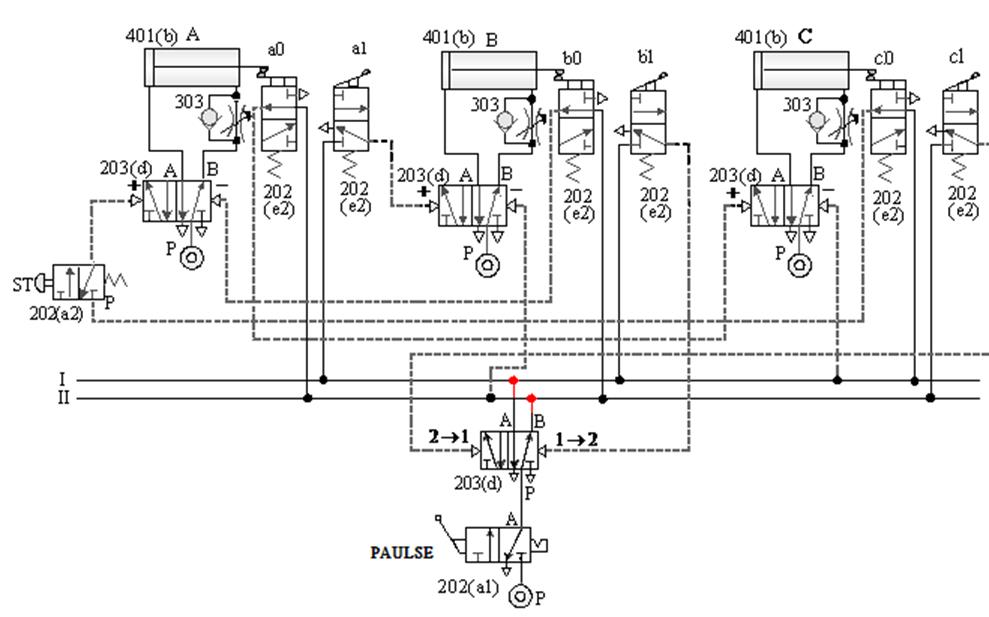
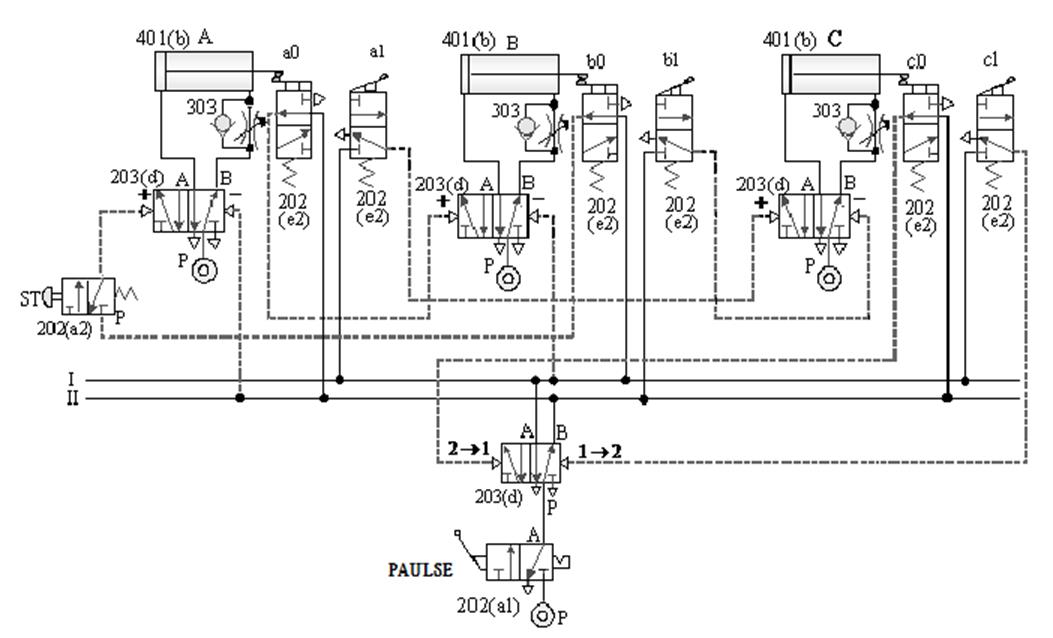
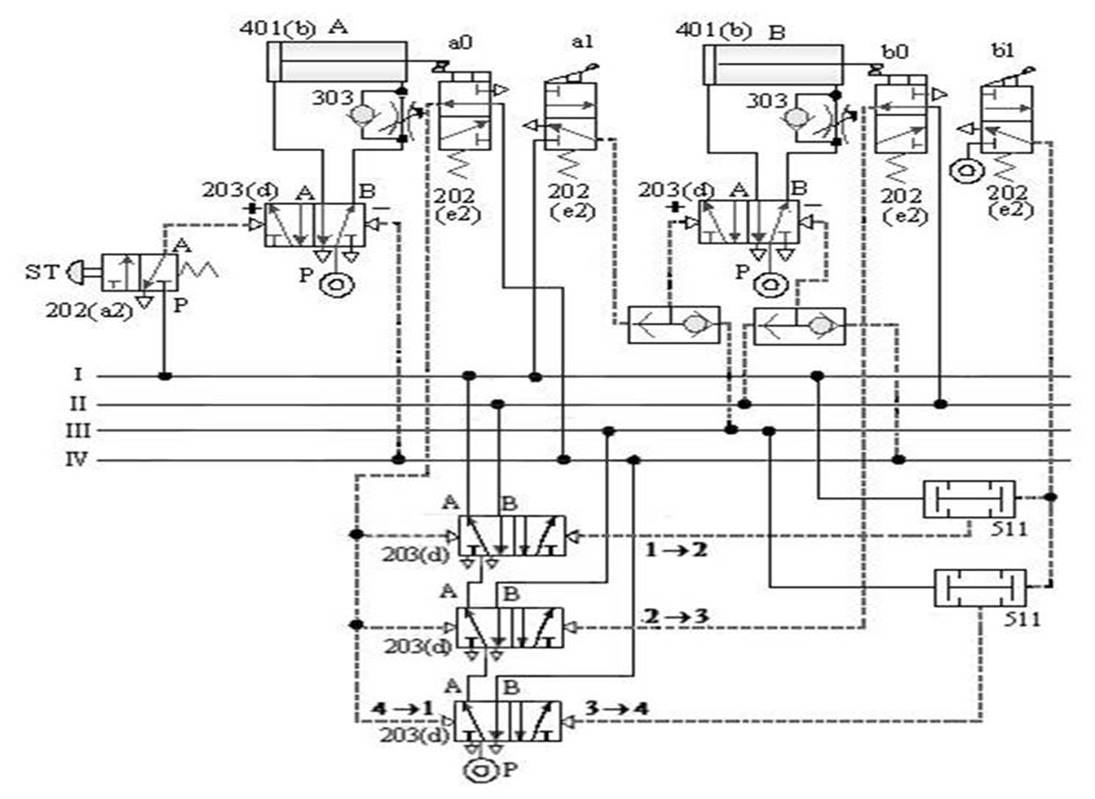
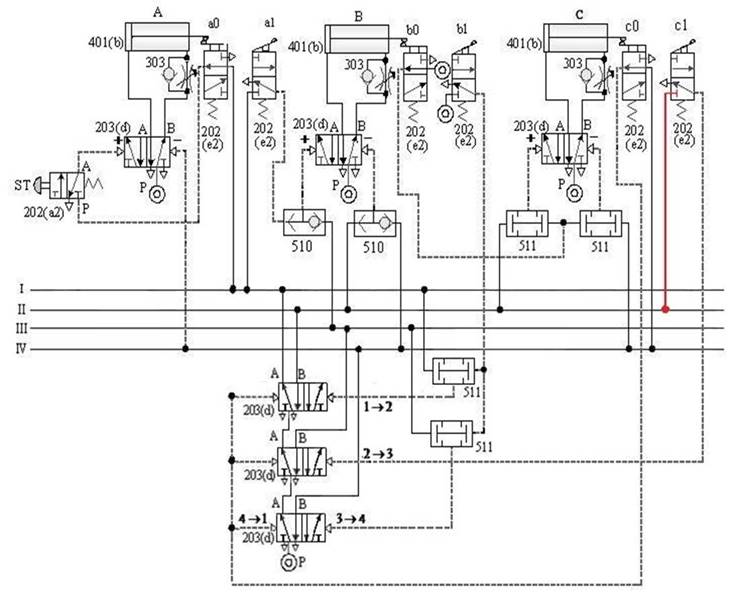
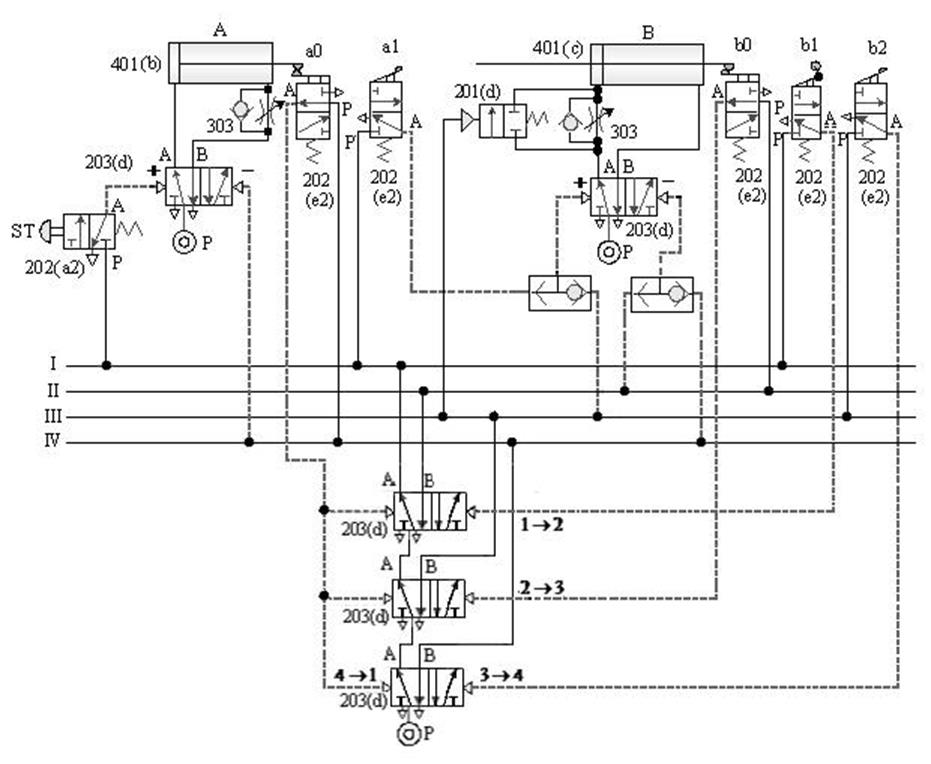
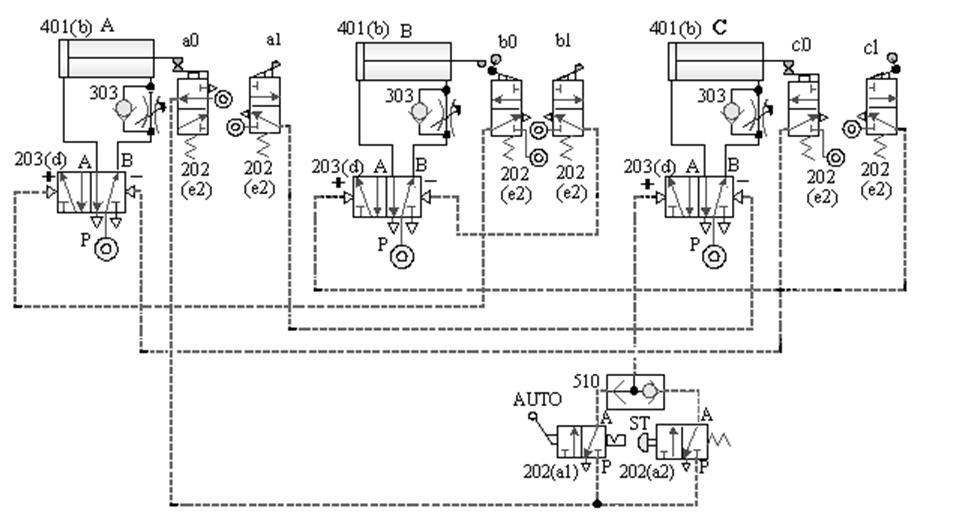
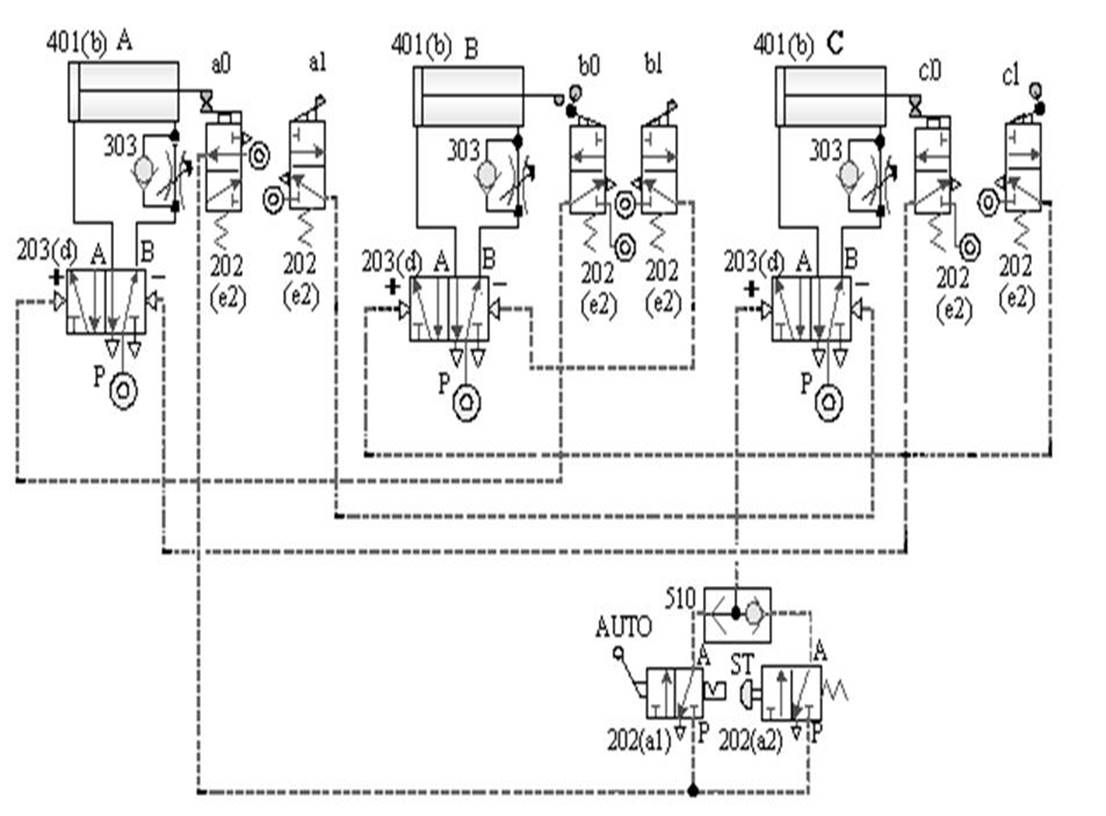
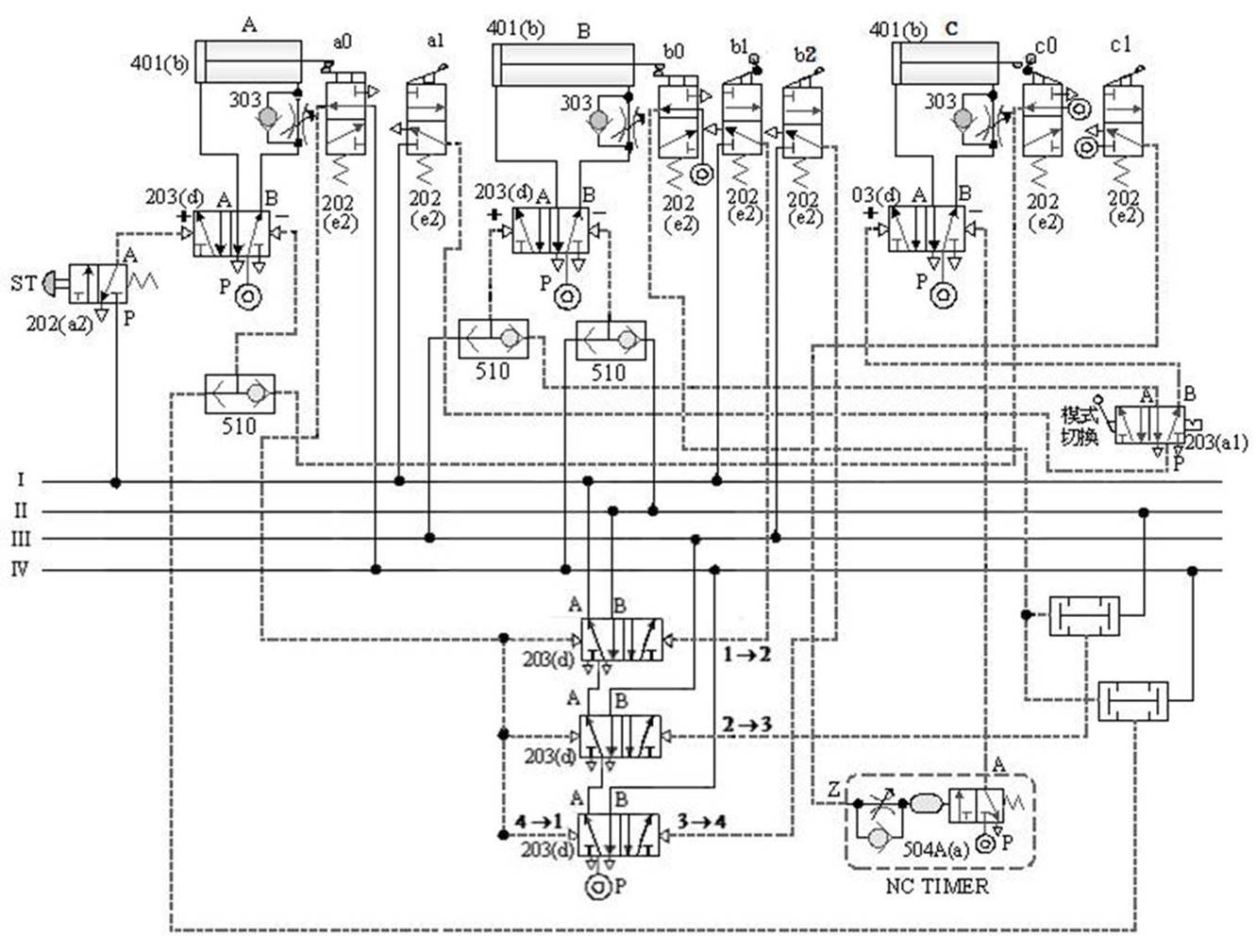
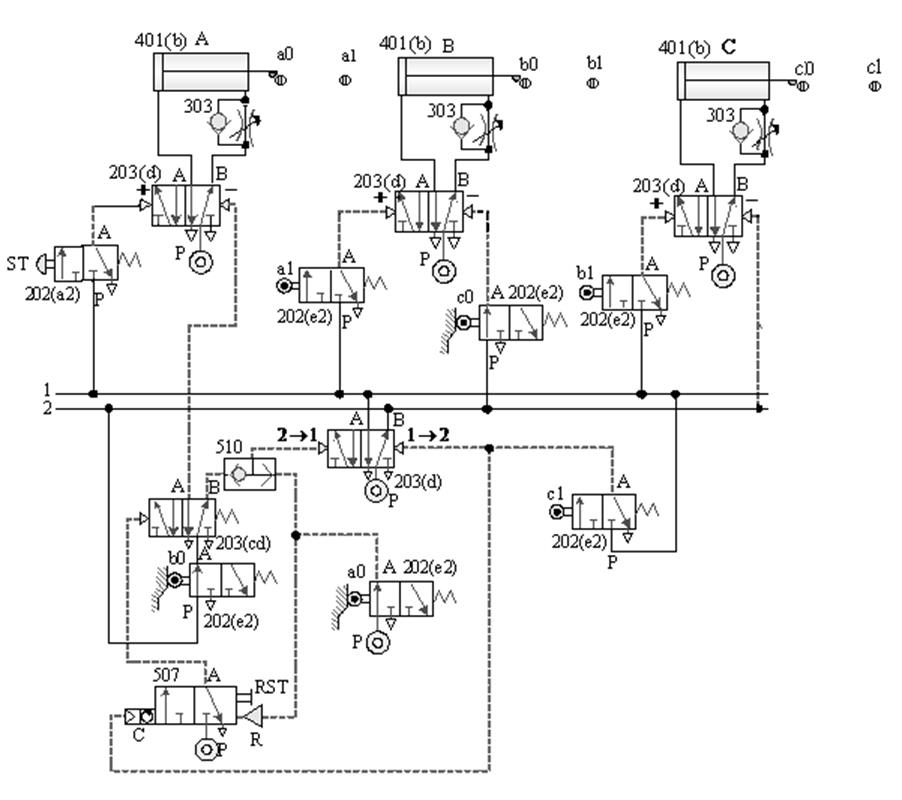
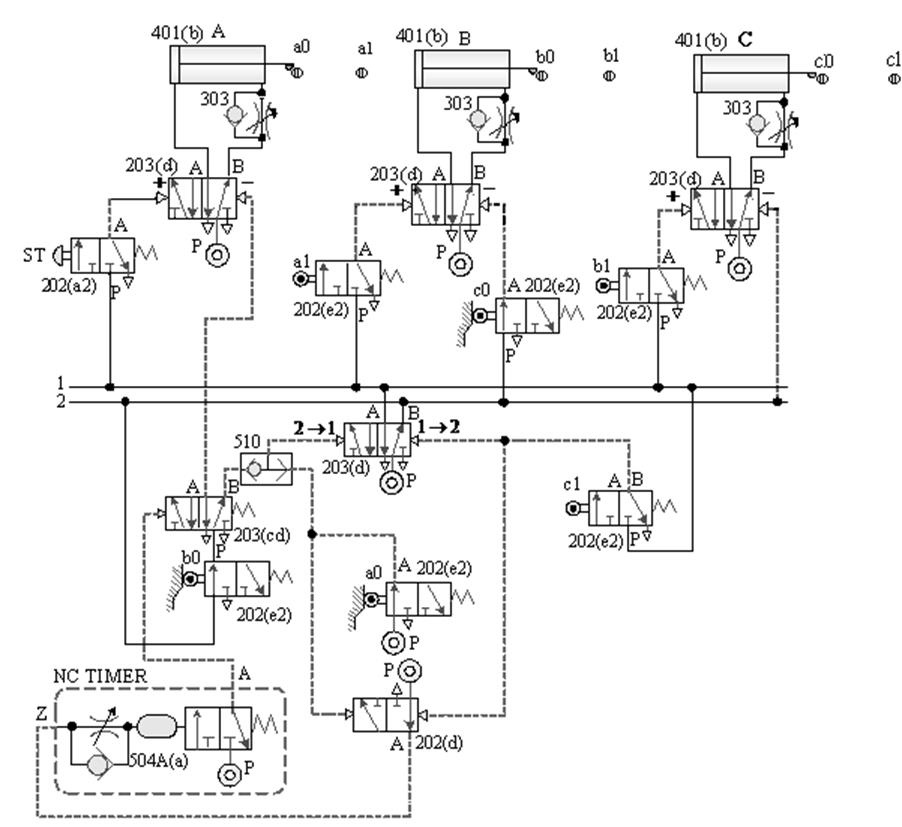
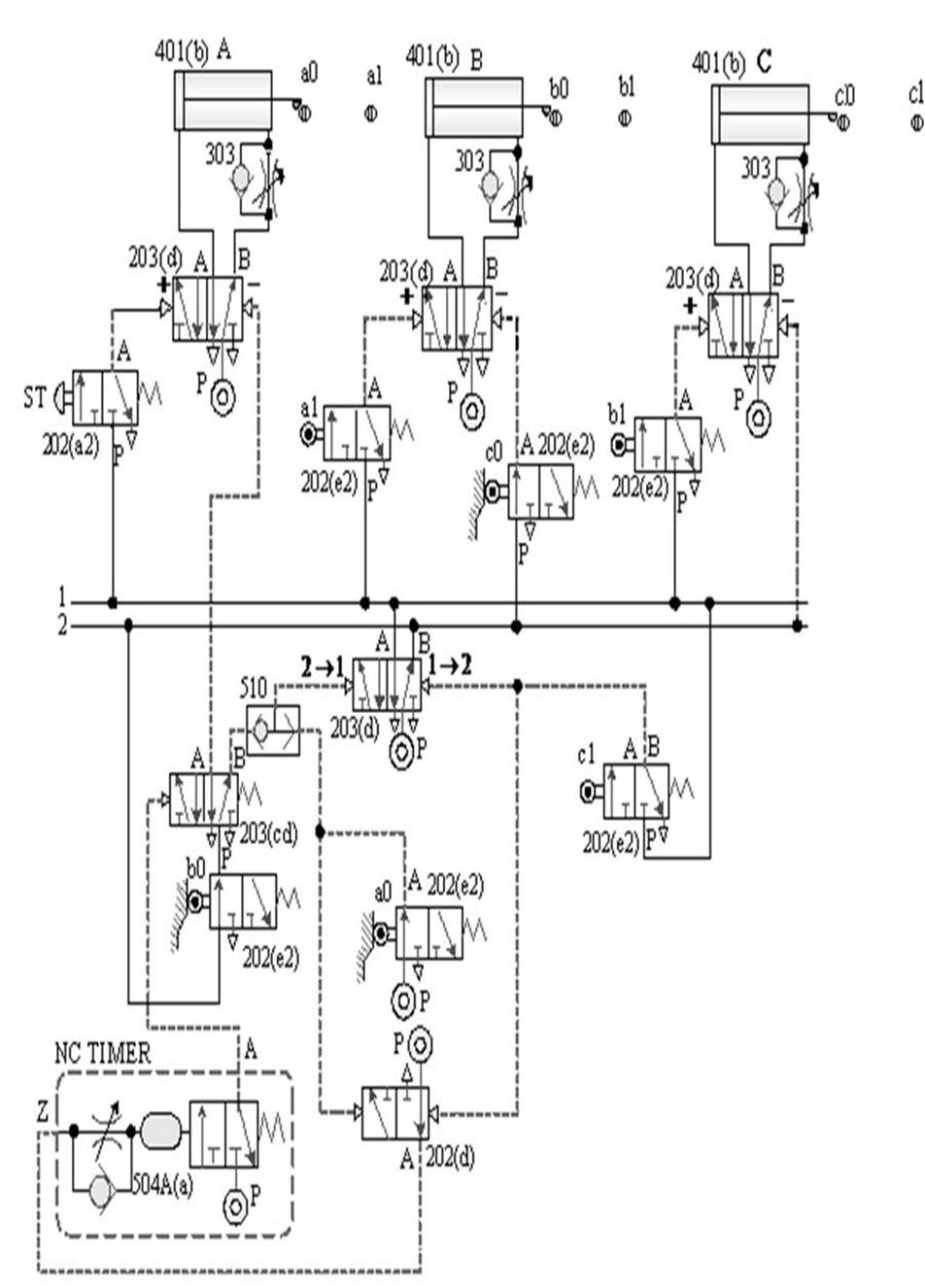
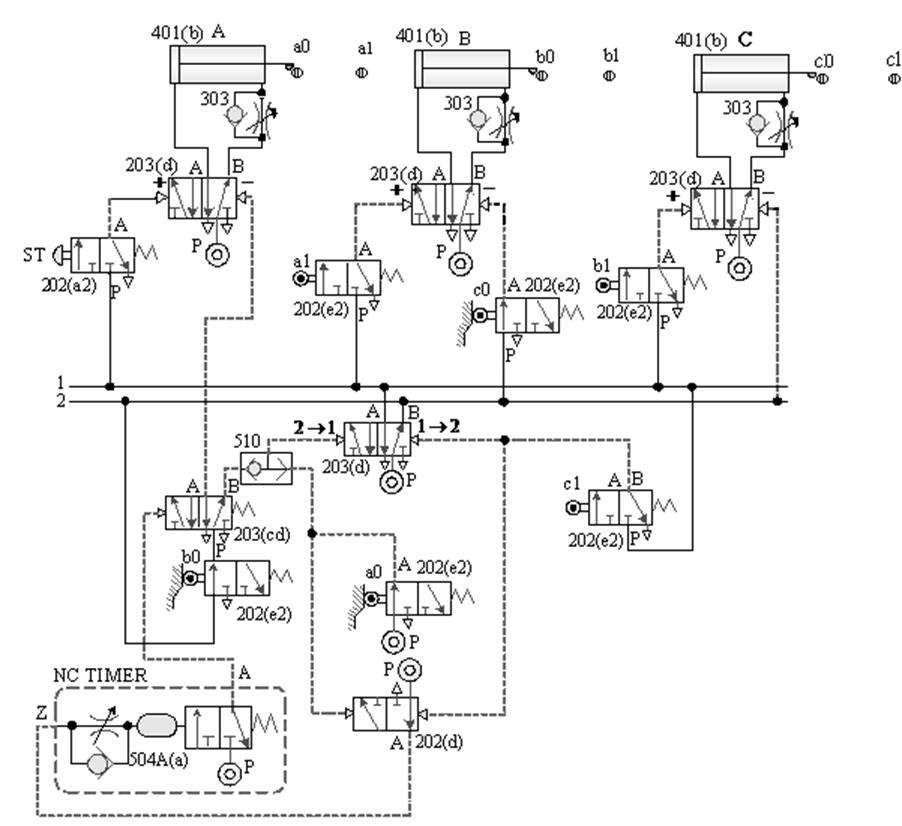
Tujuan dari praktek: tiga silinder pneumatik bekerja sama dengan katup rol dan katup pilot untuk tindakan berurutan.
A. Sirkuit aksi berurutan kaskade tiga silinder -1
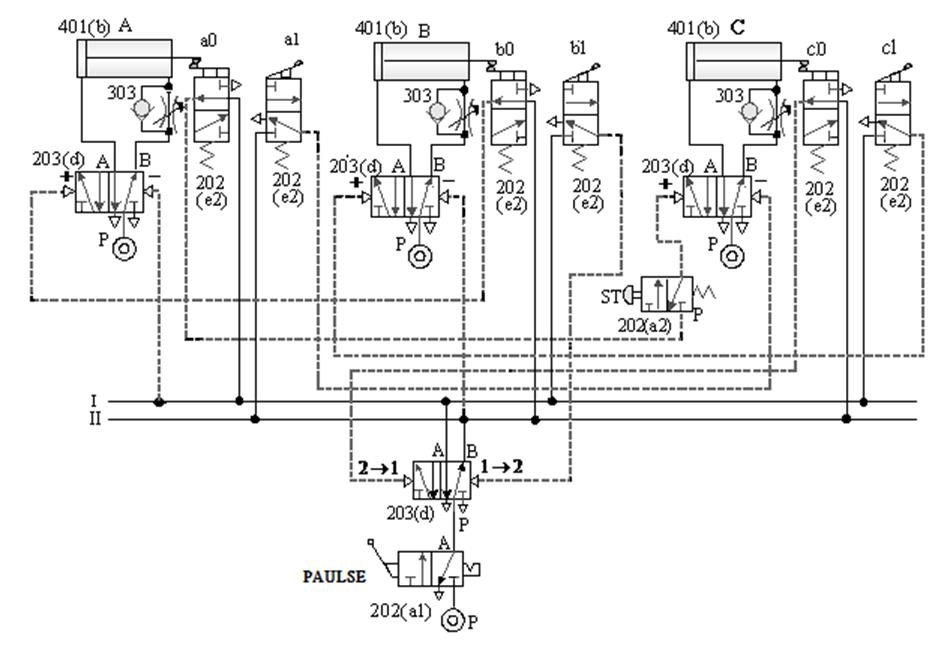
B. Sirkuit aksi berurutan kaskade tiga silinder -2
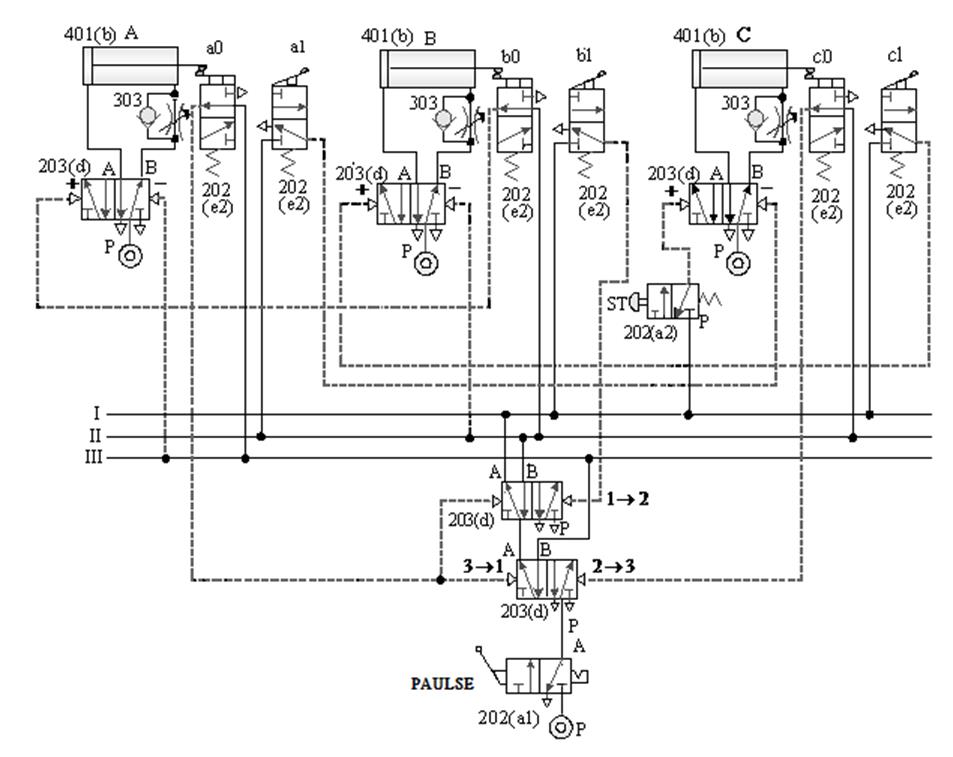
C. Loop aksi urutan kaskade tiga silinder -3
D. D. (Dalam 2 Loop aksi urutan kaskade tiga silinder -4
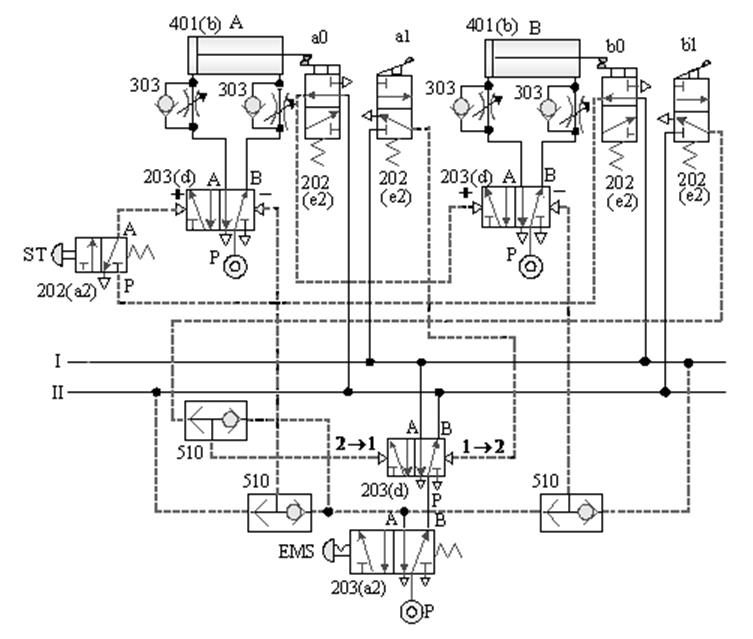
Tujuan latihan: Dua silinder pneumatik bekerja sama dengan katup rol, katup pilot pneumatik dan katup tombol menekan (tahan) 5/2 untuk kontrol tindakan urutan pengembalian darurat.
1-4-4 Sequence Control --- Loop Kontrol Tindakan Berulang
Tujuan praktik: Gunakan dua silinder pneumatik dan katup rol untuk mengontrol tindakan silinder B berulang.
A. A. Sirkuit kontrol aksi berulang silinder ganda -1
B. (Dalam 199 Tiga silinder berulang aksi kontrol sirkuit-2
Tujuan dari praktek: untuk mengontrol gerakan dua silinder dua tahap dengan metode kaskade.
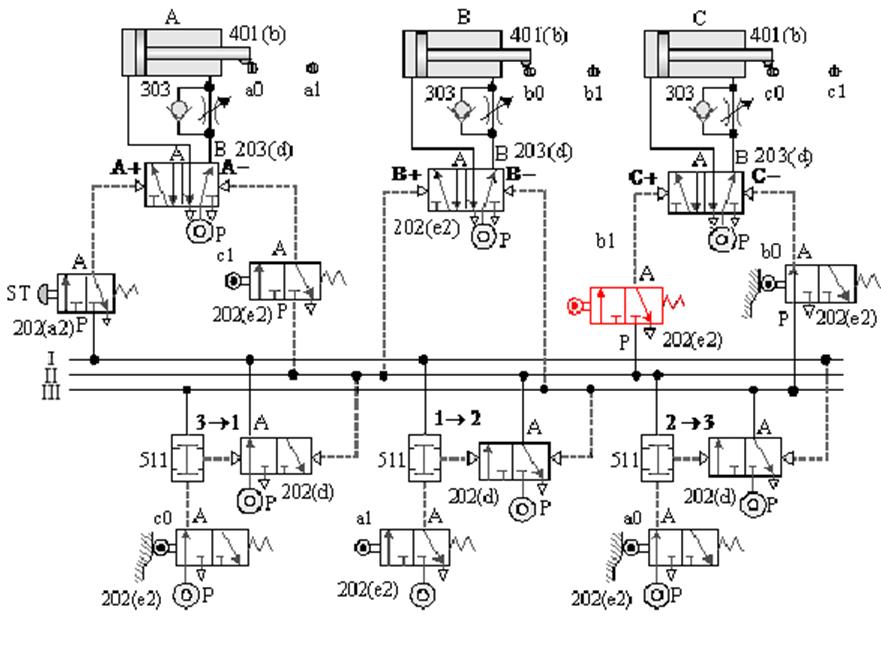
Tujuan dari praktek: untuk melakukan tindakan berurutan loop dengan tiga silinder pneumatik dalam hubungannya dengan metode langkah siklus.
A. Siklus langkah urutan kontrol loop-1
Tujuan latihan: Kontrol aksi kecepatan dua tahap silinder B dengan dua silinder pneumatik dan katup throttle cek.
1-4-8 Kontrol waktu --- loop waktu katup tunda
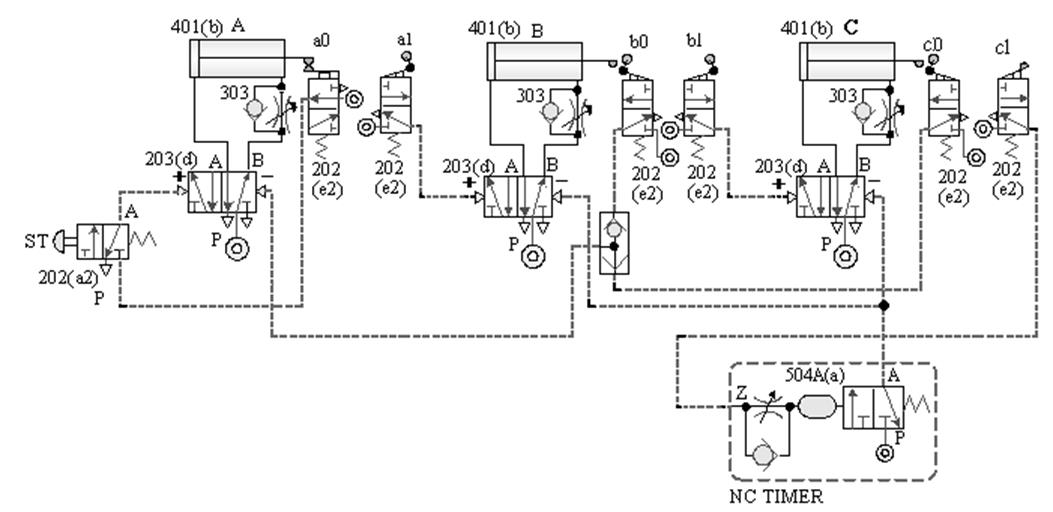
Tujuan praktek: untuk menggunakan tiga silinder pneumatik dengan katup penundaan dan katup rol untuk kontrol waktu.
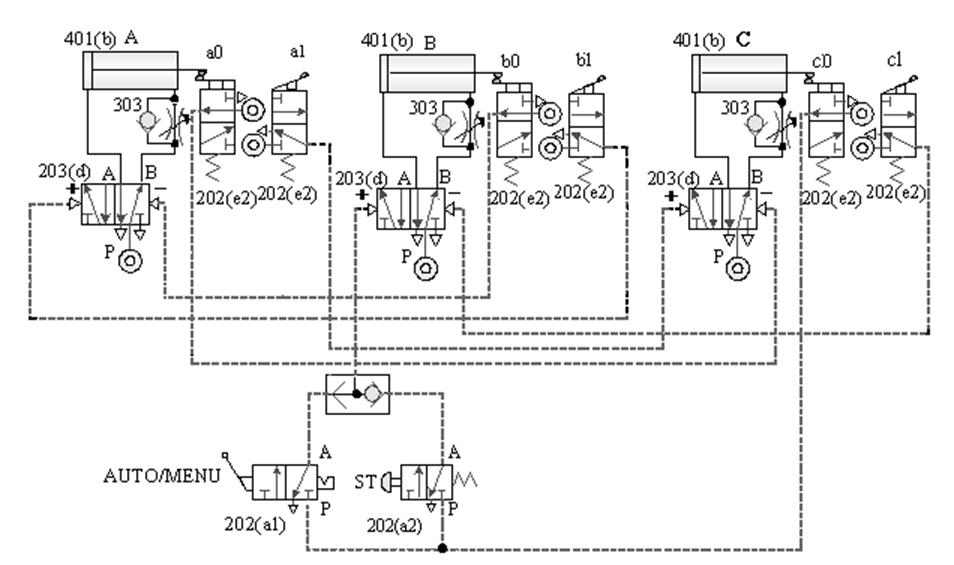
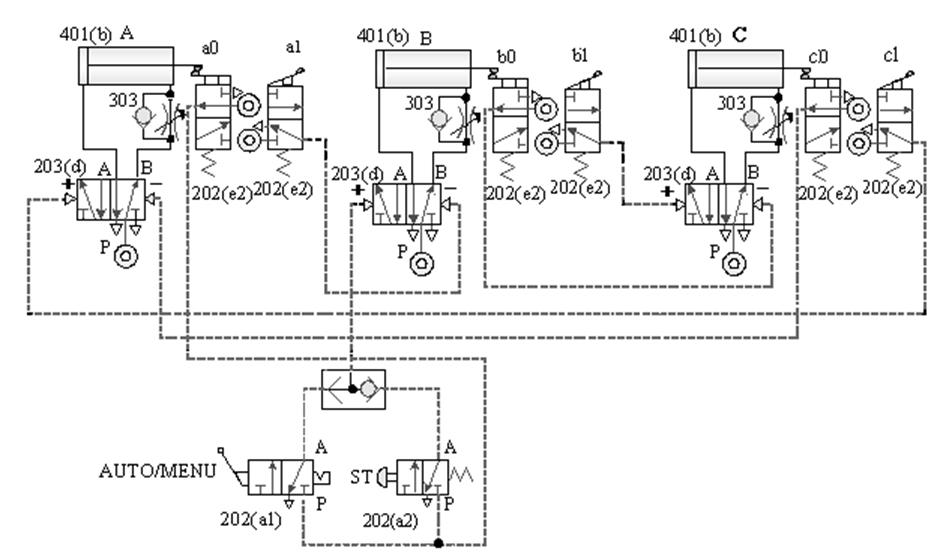
Tujuan dari praktek: silinder tiga pneumatik dan katup rol bekerja sama dengan kontrol otomatis manual untuk tindakan berurutan.
A. Tiga silinder manual / sirkuit aksi urutan otomatis -1
B. Tiga silinder manual / sirkuit aksi urutan otomatis -2
C. Tiga silinder manual / loop tindakan urutan otomatis -3
Tujuan praktek: tiga silinder pneumatik bekerja sama dengan waktu dan menghitung katup untuk melakukan urutan menghitung loop.
Tujuan praktek: tiga silinder pneumatik bekerja sama dengan waktu dan menghitung katup untuk melakukan urutan menghitung loop.
Tujuan praktek: tiga silinder pneumatik bekerja sama dengan waktu dan menghitung katup untuk melakukan urutan menghitung loop.
Tujuan latihan: Tiga silinder pneumatik bekerja sama dengan katup penghitungan untuk melakukan urutan penghitungan sirkuit.
Tujuan praktek: tiga silinder pneumatik bekerja sama dengan waktu dan menghitung katup untuk melakukan urutan menghitung loop.
Tujuan latihan: Tiga silinder pneumatik bekerja sama dengan katup penghitungan untuk melakukan urutan penghitungan sirkuit.
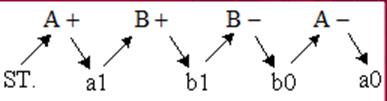
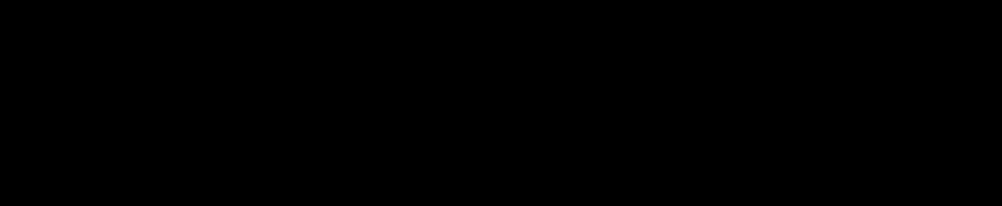
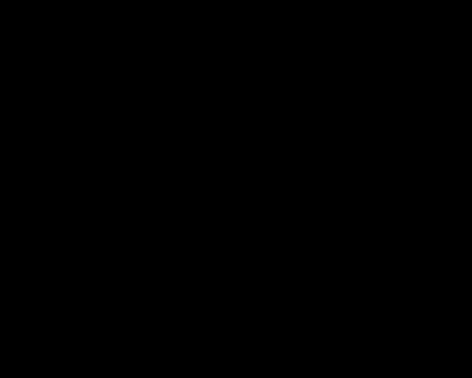
[1] Hubungan antara sinyal switching dan sentuhan: sentuhan antara silinder pneumatik dan katup rol selama stroke gerakan dan hubungan pengalihan sinyal.
Mengambil A + B + B - A - sebagai contoh, diagram hubungan antara sinyal switching dan sentuhan adalah sebagai berikut:
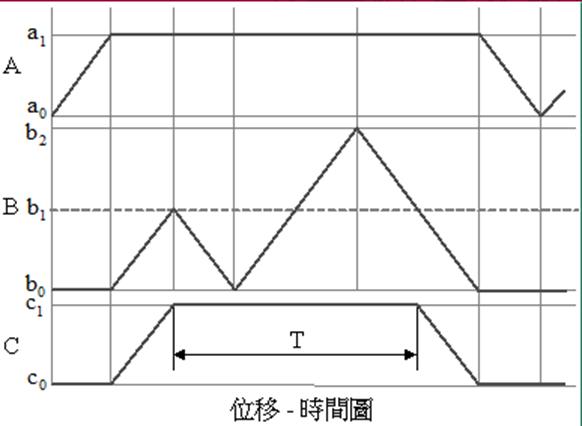
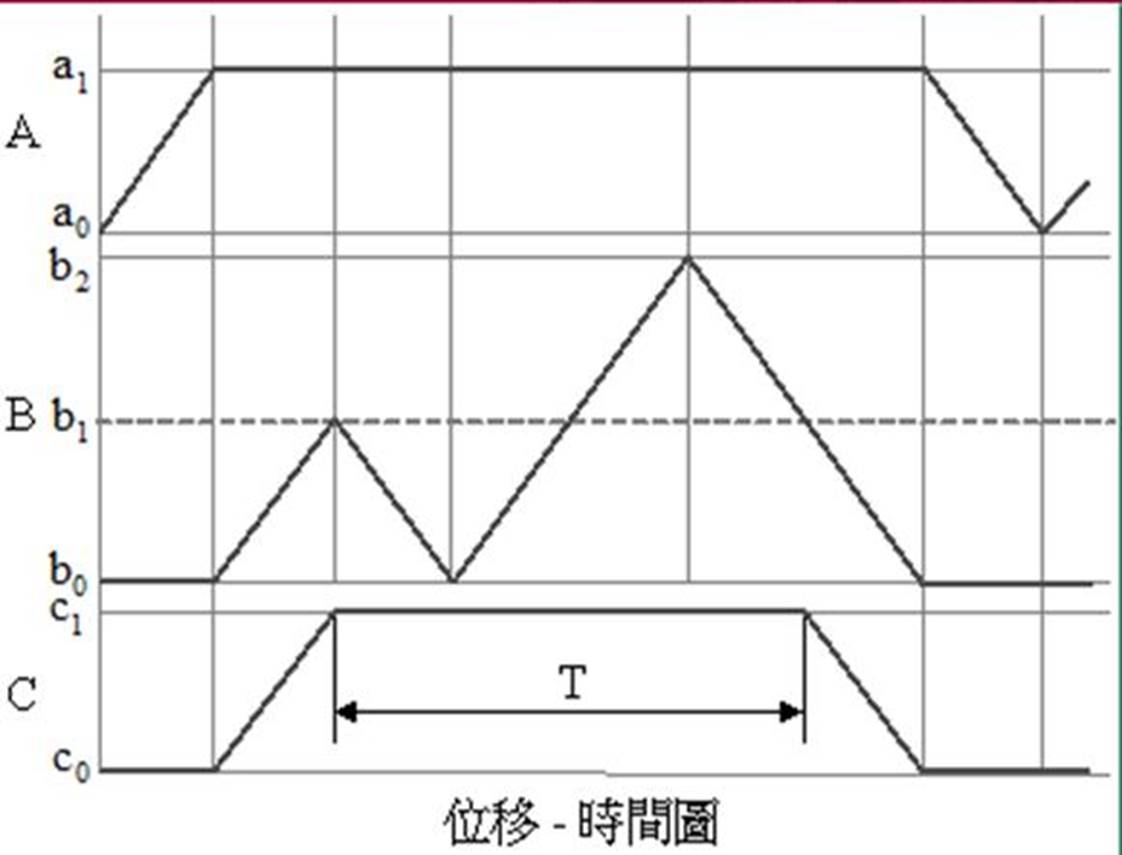
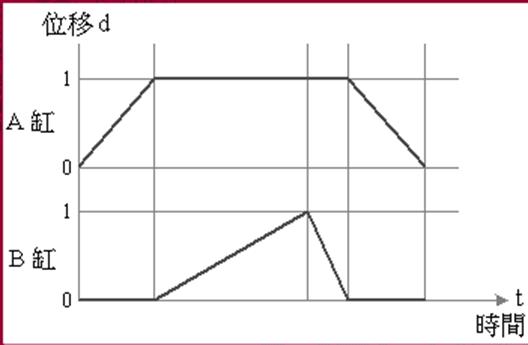
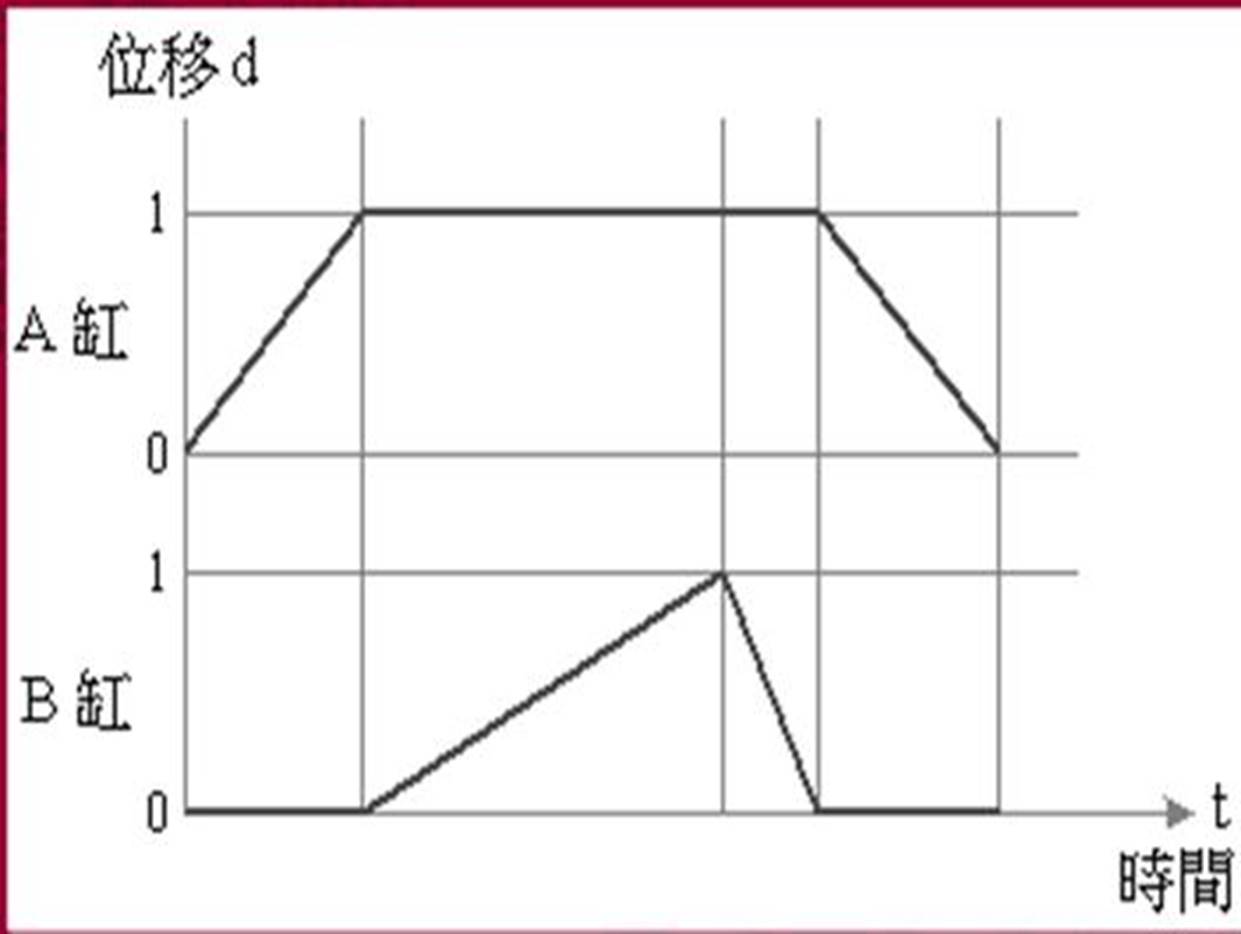
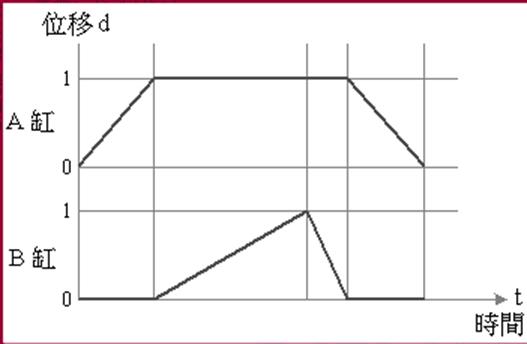
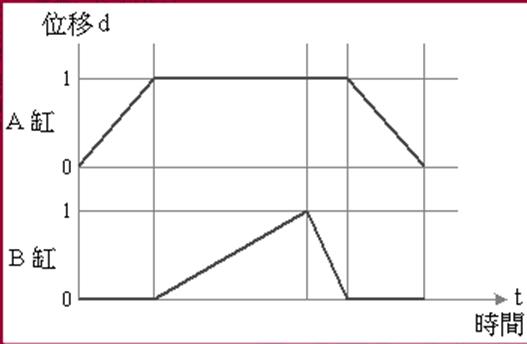
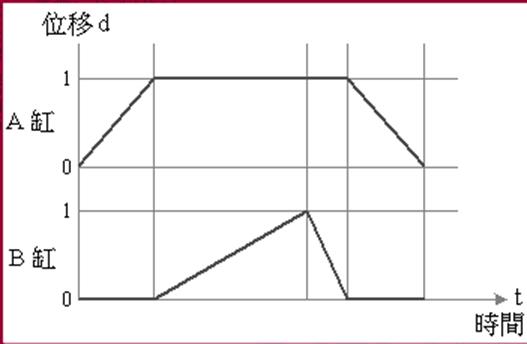
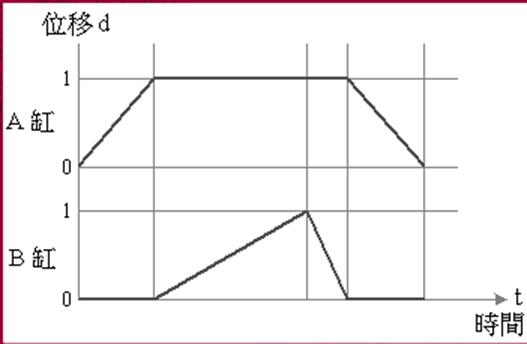
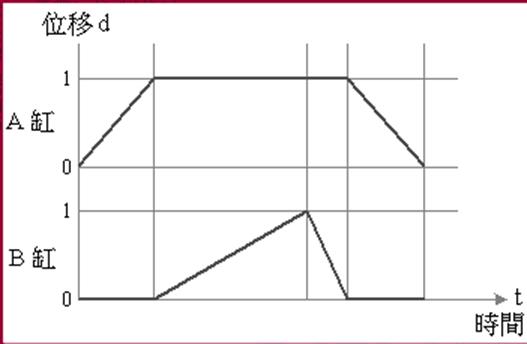
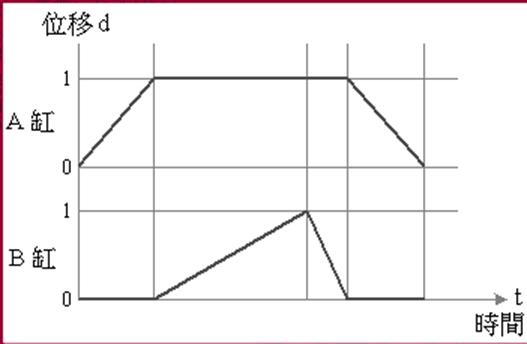
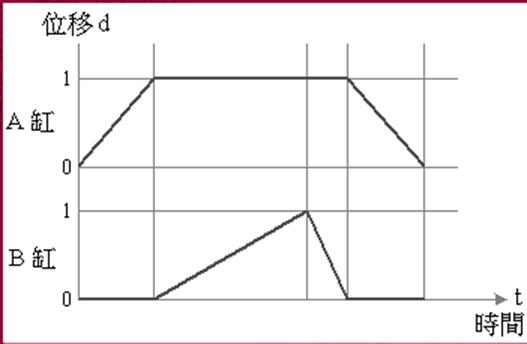
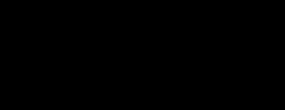
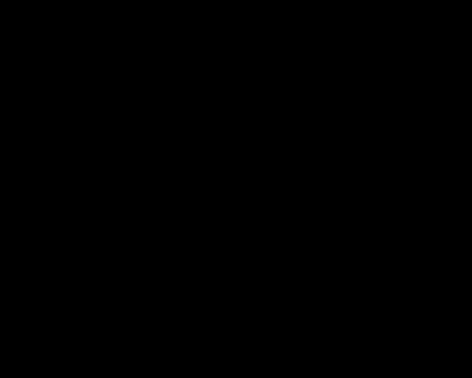
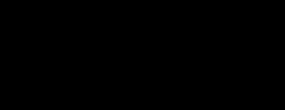
[2] Perpindahan - grafik waktu: grafik yang menunjukkan keadaan tindakan silinder pneumatik. Pada gambar, sumbu horizontal adalah waktu, sumbu vertikal adalah perpindahan, dan kemiringan adalah kecepatan.
Mengambil A + Bslow + B - A - sebagai contoh, silinder B lambat keluar dan cepat kembali, dan perpindahan - diagram waktu adalah sebagai berikut:
***************************************************************************************************************************************************************
¡@
¡@
Pembukaan Tekanan Lampiran
¡@
A. Tekanan kamar
¡@
¡@
¡@
¡@