Pengontrol yang dapat diprogram disebut PLC (Programmable the Logical the Controller) , yang menampilkan program perangkat lunak yang tersedia, untuk menggantikan pekerjaan kabel tradisional, kontrol listrik dari rangkaian kontrol langsung ke tangga (diagram tangga) yang diubah menjadi program PLC , ketik pengontrol yang dapat diprogram Ini dapat dijalankan di dalam, yang menghemat masalah pemasangan kabel, dan lebih nyaman dan fleksibel dalam debugging dan modifikasi desain.
Secara umum, struktur dasar PLC secara garis besar dapat dibagi menjadi modul input / output (I / O) , host, buku pemrograman ( pembaca ) dan penulis.
3-1.1 Masukan / Keluaran (I / O) Modul
Untuk modul input bagian dari PLC , sebagian besar mainframe mengirimkan sejumlah kecil arus searah dari terminal input X , dan kemudian melalui kontak kontrol eksternal untuk menentukan apakah kontak input adalah jalur atau tidak , apakah arusnya jalur, yaitu, host PLC menilai input berdasarkan sinyal dari titik kontrol eksternal dapat berupa saklar tombol tekan, saklar batas saklar buluh, saklar fotolistrik, saklar tekanan ...... bentuk lain dari saklar kontak.
Bagian modul keluaran sebagian besar merupakan komponen beban dengan struktur arus yang kuat, yang dapat langsung digunakan untuk kontrol dan tindakan sistem, tetapi PLC itu sendiri tidak menyuplai daya ke luar. Ia hanya menyediakan kontak sakelar antara terminal keluaran Y dan pin COM , yang memerlukan catu daya eksternal. Catu daya , secara umum, 110 V , 220 V AC atau 24 V DC, dll., Dapat dihubungkan ke katup solenoid (Solenoid) , indikator (Lampu) , bel (Buzzer) , relai (Relai) koil, penunda (Timer) coil, counter (counter) coil ... semua komponen beban yang menggunakan listrik.
¡@
Komputer host PLC mencakup catu daya, departemen aritmatika, dan departemen memori. Ia memiliki port yang dapat dihubungkan ke penulis program ( juga dikenal sebagai pembaca ) atau komputer . Ia memiliki penghitung pencacah (Counter) , waktu penundaan (Timer) , dan penyimpanan program. , Catu daya, penilaian logika dan fungsi tampilan status.
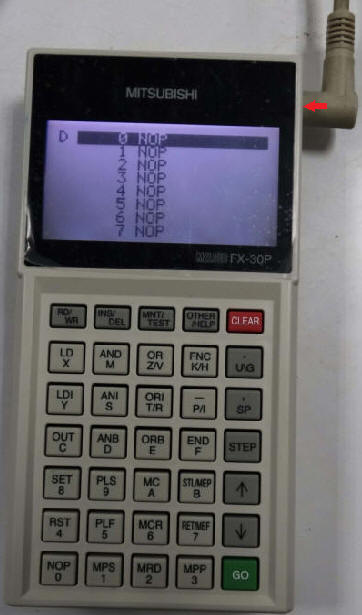
3-1.3 Host FX-3U dan penulis program ( pembaca )
Secara umum, buku pemrograman ( pembaca ) dan penulis mirip dengan keyboard komputer mikro, selain berisi tombol operasi fungsi, angka, dan tombol perintah, juga berisi tampilan status dan sakelar sakelar mode.
Selain fungsi hostnya sendiri, model PLC yang berbeda dapat disambungkan ke berbagai perangkat periferal untuk memperluas fungsinya. Perangkat terpenting adalah menyambungkan ke komputer mikro melalui antarmuka RS422 ke RS232 atau USB , menggunakan komputer mikro untuk menyusun program. Simulasi, pemantauan, penyimpanan, dll.; Itu juga dapat dihubungkan ke pembakar ROM untuk langsung membakar aplikasi perangkat lunak PLC ke dalam memori hanya-baca untuk aplikasi fungsi tetap.
¡@
3-2 Mitsubishi FX tipe dari PLC ATAS

¡@¡@
3-2.1 Deskripsi instruksi dasar
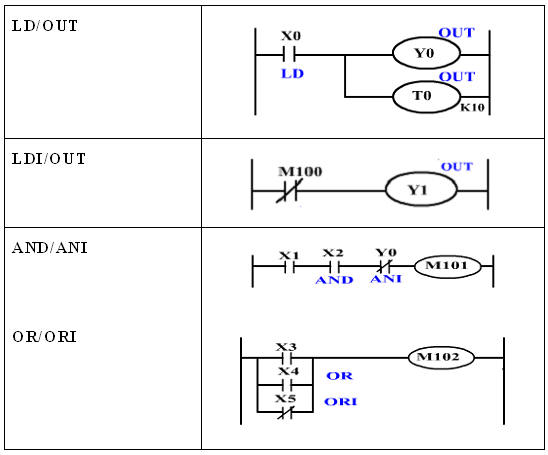
1. X : Relai input (X0 ~ X177 , hingga 128 poin )
2. Y : relai keluaran (Y0 ~ Y177 , hingga 128 poin )
3. M : relai tambahan ( umumnya: M0 ~ M499 , 500 poin. Retensi kegagalan daya: M500 ~ M1023 , 524 poin )
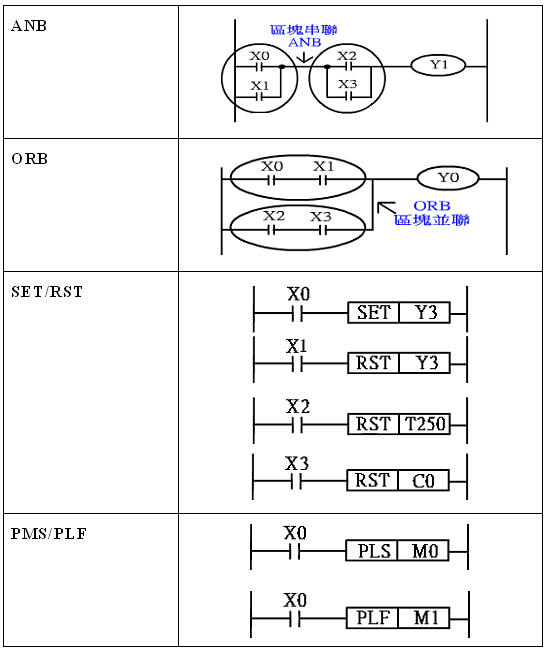
4. T : Delayer ( umumnya: 0,1 detik: T0 ~ T199 , 200 poin; 0,01 detik: T200 ~ T245 , 46 poin. Retensi kegagalan daya: 0,1 detik: T246 ~ T249 , 4 poin; 0,01 detik: T250 ~ T255 , 6 Titik )
5. C : Penghitung ( umumnya: C0 ~ C99 , 100 poin. Retensi kegagalan daya: C100 ~ C199 , 100 poin )
Penghitung atas-bawah ( biasanya: C200 ~ C219 , 20 titik terkunci :. C220 ~ C234 , 15 titik ) , penghitung kecepatan tinggi (C235 ~ C255 , 21 adalah titik )
6. S : Relai status ( penggunaan awal: S0 ~ S9 , 10 poin. Atur ulang penggunaan: S10 ~ S19 , 10 poin. Penggunaan umum, S20 ~ S499 , 480 poin. Retensi kegagalan daya: S500 ~ S899 , 400 poin )
7. D : Register data ( umumnya: D0 hingga D199 , 200 poin. Retensi kegagalan daya: D200 hingga D511 , 312 poin ) , register file (D1000 hingga D2999 , 2000 poin ) , register khusus (D8000 hingga D8255) , 256 poin )
8. V , Z : register indeks
9. P , I : indikator
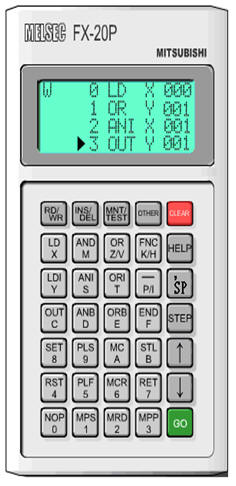
Penulis buku pemrograman HPP (Handy Programming Panel) ( pembaca ) dapat dibagi menjadi dua bagian: area tampilan dan area keyboard ( seperti yang ditunjukkan pada Gambar 3-3 ) . Area tampilan dapat menampilkan mode operasi dan perintah 4- langkah; area keyboard dapat dibagi menjadi Tombol perintah, tombol mode, dan tombol kontrol adalah kategori yang luas. Tombol perintah terletak di area kanan bawah buku ( pembaca ) dan penulis, termasuk perintah program, bahasa Inggris dan tombol angka; tombol mode dapat mengatur mode pengeditan dan pemantauan periferal, fungsi pengujian dan bantuan; tombol kontrol Untuk tujuan pengendalian pemrograman, mereka diperkenalkan sebagai berikut
Tombol mode
RD / WR: Hanya mode baca / tulis
INS / DEL: mode masukkan / hapus
MNT / TEST: monitor / mode tes
LAINNYA: O N LINE / OFF LINE mode fungsi switching dan pilihan istilah nya
FUN HELP: Menampilkan daftar fungsi
Tombol kontrol
1. CLEAR: Hapus tampilan
2. BANTUAN: Cari nomor instruksi fungsi
3. , / SP: koma dan spasi
4. LANGKAH: Urutan langkah
5. ¡ô: Mundur selangkah
6. ¡õ: pesanan lebih lanjut
7. GO: Penulisan program atau pelaksanaan fungsi
¡@
1. RUN mode program eksekusi
2. BERHENTI menghentikan eksekusi dan mode pengeditan program
 ¡@
¡@
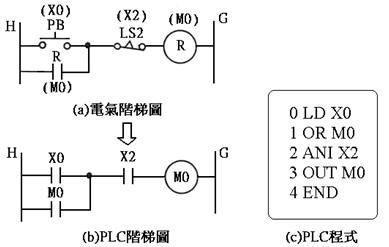
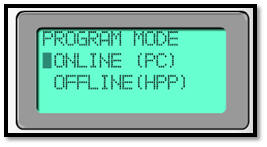
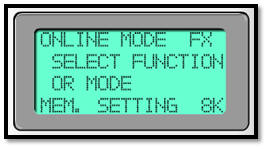
Langkah 1 : Memasukkan buku kode ( read ) penulis, power dihidupkan, pilih ON LINE modus tekan GO untuk masuk ke layar pemilihan mode oleh RD / WR kunci 2 memasuki kali mode tulis.
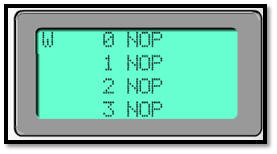
Langkah 2 : Hapus konten memori ( baris 0 hingga baris 7999 ) , ketik tombol NOP , A , GO , dan GO secara berurutan dan tunggu teks SELESAI ditampilkan .
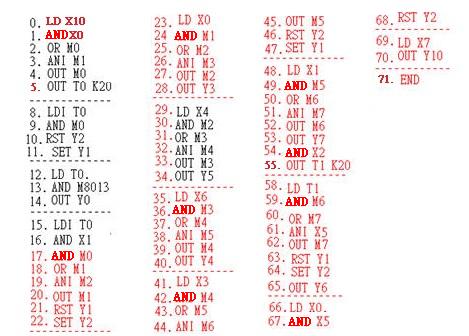
Langkah 3 : Masukkan program secara berurutan dan tekan tombol GO untuk menulis setelah setiap masukan goresan .
Langkah 4 : Urutan keyingnya adalah LD , X , 0 , GO , OR , M , 0 , GO , ANI , X , 2 , GO , OUT , M , 0 , GO , END , GO .
¡@
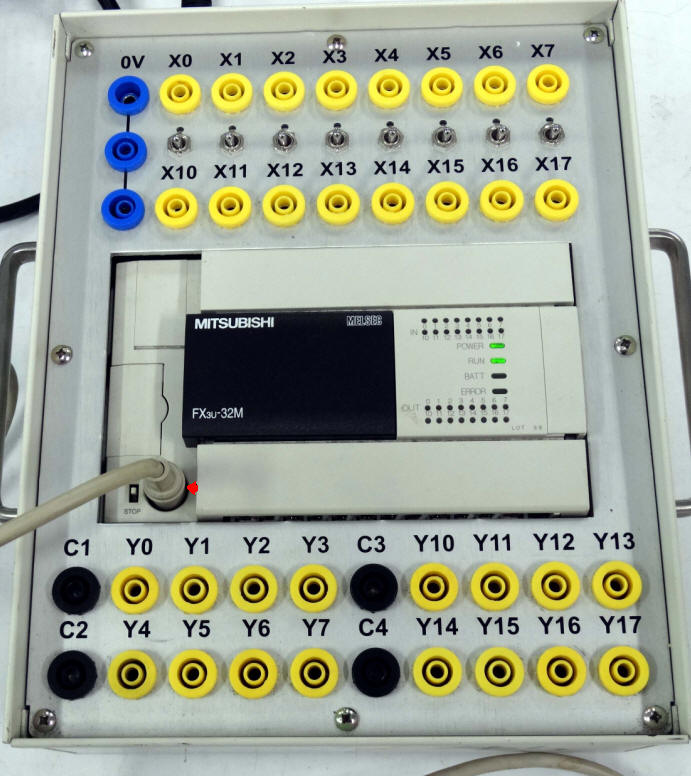
¡@3-2.6 Input / Output (I / O) Wiring
PLC dapat diprogram kontrol, hanya perlu menghubungkan kabel input / output (I / O) , sisa logika rangkaian ditangani oleh program internal. Terminal input X dari pengontrol terprogram tipe FX dapat memiliki dua mode: catu daya eksternal (PNP) dan catu daya internal (NPN) . Di sini, mode catu daya internal diadopsi. PLC menyediakan daya penginderaan untuk terminal input. Terminal X Sakelar input terhubung langsung ke terminal COM (0V) untuk memberikan sinyal input.Ketika sakelar dihidupkan, terminal input diberi energi, dan relai input internal bersemangat untuk memberikan sinyal input ke PLC .
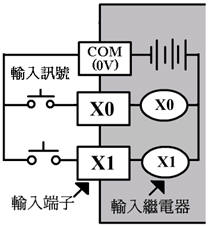
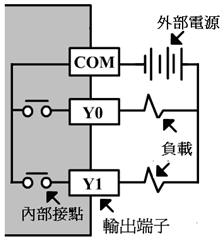
Diagram pengkabelan terminal masukan Diagram pengkabelan terminal keluaran
3-3 Tindakan pencegahan dasar ¡@
1. Boot harus mengkonfirmasi pilihan mode operasi koneksi "ONLINE" , karena sudah memasuki mode edit, dan menekan dapat "LAIN" masuk opsi 1 , untuk menghubungkan / mematikan mode .
2. Setelah masuk ke layar pemilihan mode, pilih mode "W" untuk memulai pemrograman, dan benar-benar memahami mode operasi ( RD / WR : read only / edit , DEL / INS : delete / insert , MNT / TEST : monitor / test , RUN / S : eksekusi program / s ) fungsi.
3. Saat menulis program untuk pertama kalinya , Anda harus mengetik NOP ¡÷ A ¡÷ GO ¡÷ GO dalam mode "W" untuk menghapus program lama di host terlebih dahulu untuk menghindari kebingungan dan gangguan antara program baru dan lama ; jika Anda mengedit, Anda ingin menghapus beberapa baris Program dapat dihapus baris demi baris dalam mode DELETE .
4. Saat menulis program, tuan rumah harus beralih ke mode S . Jika Anda mengedit program dalam mode RUN , ketika penulis buku ( pembaca ) menampilkan "PLC RUNNING" , Anda harus beralih kembali ke mode S dan tekan tombol CLEAR untuk menghapus tampilan, dan kembali ke pengeditan mode.
5. Jika Anda perlu memasukkan perintah fungsi, Anda harus merujuk ke nomor fungsinya ( seperti MOV = FNC 12 , ZRST = FNC 40 ...) , tekan FNC , HELP secara berurutan , dan masukkan item sesuai dengan kategori fungsi (00 , 01 , 02 , 03 ...) Masukkan kueri.
6. Perhatian harus diberikan pada keselamatan penggunaan listrik Jika ada panas berlebih yang tidak normal, bau, atau asap, catu daya harus segera dimatikan, dan catu daya dapat dihidupkan setelah pemecahan masalah.
7. Saat memasang dan mencabut berbagai konektor atau antarmuka listrik, catu daya utama harus dimatikan terlebih dahulu untuk menghindari kerusakan.
8. Ujung input X dihubungkan ke kontak sakelar , dan ujung keluaran Y terhubung ke komponen beban.Jangan salah menghubungkannya.
9. Umpan balik posisi silinder pneumatik dapat menggunakan sakelar buluh magnet (MS) yang dipasang pada badan silinder atau memasang sakelar batas (LS) pada langkah batang silinder untuk menggunakan kontak NO -nya sebagai umpan balik. Jika Anda menggunakan sakelar buluh, Anda harus berhati-hati untuk tidak menghubungkannya langsung ke catu daya atau terminal output PLC Y dalam kondisi tanpa beban , jika tidak, akan ada risiko kelebihan beban dan terbakar.
10. Saat program dijalankan, jangan menghalangi aksi silinder udara atau meletakkan benda di dalam kayuhannya untuk menghindari bahaya atau cedera.
11. Setelah semua operasi selesai, harus dimatikan dan sumber tekanan listrik, perangkat homing, untuk membersihkan meja , dan benar - benar mengisi tabel riwayat penggunaan .
12. Diagram sirkuit pneumatik dalam bab ini dan konfigurasi dasar I / O ( input / output ) ditunjukkan pada Gambar 3-8 .
¡@
3-4 sirkuit dasar
3-4-1¡@Sirkuit aksi satu silinder solenoid valve tunggal: sirkuit aksi langsung
1. Tujuan dari latihan ini: untuk memahami kontrol dasar dan fungsi tampilan status dari PLC .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C

¡@
Diagram dan program tangga PLC
3-4-2¡@Sirkuit aksi satu silinder solenoid valve ganda: sirkuit aksi langsung
1. Tujuan dari latihan ini: untuk memahami kontrol dasar dan fungsi tampilan status dari PLC .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB.1 / X7: PB.2
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B - / Y5: SOL.C + / Y6: SOL.C -
Diagram tangga PLC dan program
3-4-3¡@katup solenoid tunggal lingkaran kontrol perlindungan diri silinder tunggal
1. Tujuan latihan: latihan sirkuit memori ( perlindungan diri ) .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB.1 / X7: PB.2
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C
Diagram dan program tangga PLC
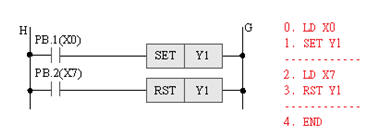
Diagram tangga LC dua
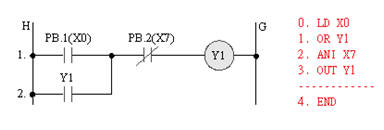
Diagram tangga PLC tiga
3-4-4¡@Katup solenoid tunggal silinder tunggal satu sirkuit bolak- balik
1. Tujuan latihan: latihan sirkuit memori ( perintah ) dengan katup solenoid tunggal dalam kontrol bolak-balik silinder pneumatik .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Alokasi I / O : X0: PB.1 / X2: MS.2 / X4: MS.4 / X6: MS.6
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C
Diagram dan program tangga PLC
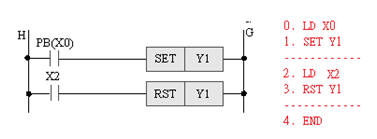
Diagram tangga PLC dua
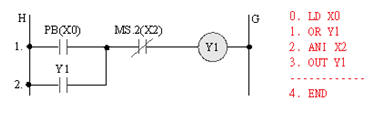
Diagram tangga PLC tiga
3-4-5¡@katup solenoid ganda silinder tunggal satu sirkuit bolak-balik
1. Tujuan latihan: latihan kontrol timbal balik sirkuit memori dengan katup solenoid ganda di silinder pneumatik.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 / X5: MS.5 / X6: MS.6
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B - / Y5: SOL.C + / Y6: SOL.C -
Diagram dan program tangga PLC
3-4-6¡@Katup solenoid tunggal sirkuit bolak- balik kontinu
1. Tujuan latihan: latihan kontrol bolak-balik otomatis dari katup solenoid tunggal dalam silinder pneumatik dengan sirkuit memori.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 / X5: MS.5 / X6: MS.6 / X7: PB .2
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C
Diagram dan program tangga PLC
3-4-7 sirkuit bolak-¡@balik terus menerus solenoid valve ganda
1. Tujuan latihan: latihan kontrol bolak-balik otomatis dari sirkuit memori dengan katup solenoid ganda dalam silinder pneumatik.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 / X5: MS.5 / X6: MS.6 / X7: PB .2
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B - / Y5: SOL.C + / Y6: SOL.C -
Diagram dan program tangga PLC
3-4-8¡@loop fungsi waktu
1. Tujuan latihan: untuk memahami karakteristik tindakan pengatur waktu.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Tata letak I / O : X0: SW
Y1: SOL.A / Y2: SOL.B
Diagram dan program tangga PLC
3-4-9¡@Sirkuit timing katup solenoid tunggal
1. Tujuan magang: untuk memahami karakteristik dan aplikasi pengatur waktu.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB.1 / X7: PB.2
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C
Diagram dan program tangga PLC
3-4-10¡@sirkuit timing katup solenoid ganda
1. Tujuan magang: untuk memahami karakteristik dan aplikasi pengatur waktu.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB.1 / X1: MS.1 / X7: PB.2
Y1: SOL.A + / Y2: SOL.A -
Diagram dan program tangga PLC
3-4-11¡@Menghitung rangkaian fungsi
1. Tujuan magang: untuk memahami karakteristik tindakan counter.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Konfigurasi I / O : X1: PB.1 / X2: PB.2
Y1: SOL.A / Y2: SOL.B
Diagram dan program tangga PLC
3-4-12¡@sirkuit penghitungan katup solenoid tunggal
1. Tujuan magang: untuk memahami karakteristik dan aplikasi counter.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2
Y1: SOL.A
Diagram dan program tangga PLC
3-4-13¡@sirkuit penghitungan solenoid valve ganda
1. Tujuan magang: untuk memahami karakteristik dan aplikasi counter.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB / X1: MS.1 / X2: MS.2
Y1: SOL.A + / Y2: SOL.A -
Diagram dan program tangga PLC
3-4-14 Sirkuit aplikasi perintah ¡@solenoid valve SET / RST tunggal
1. Tujuan latihan: Gunakan katup solenoid tunggal untuk mengontrol silinder pneumatik dengan input tombol dan instruksi SET / RST .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X7: PB.2
Y1: SOL.A
Diagram dan program tangga PLC
3-4-15 sirkuit aplikasi perintah SET / RST ¡@katup solenoid ganda
1. Tujuan latihan: dengan input tombol dan perintah SET / RST untuk mengontrol silinder pneumatik dengan katup solenoid ganda .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X7: PB.2
Y1: SOL.A + / Y2: SOL.A -
Diagram dan program tangga PLC
3-4-16¡@sirkuit kontrol tombol tunggal solenoid valve ganda
1. Tujuan dari latihan: praktek aplikasi kontrol tombol tunggal.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB / X1: MS.1
Y1: SOL.A + / Y2: SOL.A -
Diagram dan program tangga PLC
3-4-17 Penerapan instruksi MOV -1¡@
1. Tujuan latihan : gunakan instruksi MOV untuk mengubah parameter pengatur waktu agar pengaturan waktu silinder udara berubah.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Alokasi I / O : X0: PB / X2: MS.2 / X7: SW.1 / X10: SW.2
Y1: SOL.A
Diagram dan program tangga PLC
3-4-18 Penerapan instruksi MOV -2
1. Tujuan latihan : gunakan instruksi MOV untuk mengubah parameter penghitung untuk mengubah jumlah gerakan silinder pneumatik.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB / X7: SW.1 / X10: SW.2
Y1: SOL.A + / Y2: SOL.A -
Diagram dan program tangga PLC
Penerapan 3-4-19¡@katup solenoid tunggal OFF DELAY timing reset circuit
1. Tujuan latihan: Gunakan sirkuit OFF DELAY untuk mempraktekkan pengaturan pengembalian waktu silinder pneumatik.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB
Y1: SOL.A
Diagram dan program tangga PLC
Penerapan 3-4-20¡@double solenoid valve OFF DELAY timing reset circuit
1. Tujuan latihan: Gunakan sirkuit OFF DELAY untuk mempraktekkan pengaturan pengembalian waktu silinder pneumatik.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Konfigurasi I / O : X0: PB / X1: MS.1
Y1: SOL.A + / Y2: SOL.A -
Diagram dan program tangga PLC
3-5 loop aplikasi HOME
3-5-1¡@sirkuit aksi urutan silinder solenoid katup ganda tunggal
1. Tujuan latihan: untuk memahami penerapan PLC dalam kontrol sekuens dari satu katup solenoid .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
A. Sirkuit aksi sekuensial silinder ganda -1
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X4: MS.4 / X7: PB.2
Y1: SOL.A / Y2: SOL.B
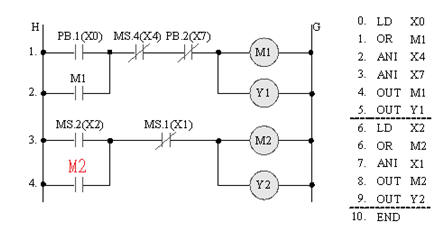
Diagram dan program tangga PLC
B. Sirkuit aksi sekuensial silinder ganda -2
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X7: PB.2
Y1: SOL.A / Y2: SOL.B
Diagram dan program tangga PLC
C. ganda silinder sirkuit aksi sekuensial -3
Alokasi I / O : X0: PB / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4
Y1: SOL.A / Y2: SOL.B
Diagram dan program tangga PLC
3-5-2¡@Sirkuit aksi urutan silinder ganda solenoid valve ganda
1. Tujuan latihan: untuk memahami penerapan PLC dalam kontrol sekuensial katup solenoid ganda .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
A. Sirkuit aksi sekuensial silinder ganda -1
Alokasi I / O : X0: PB / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B -
Diagram dan program tangga PLC
B.Rangkaian aksi urutan silinder ganda -2
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X7: PB.2
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B -
Diagram dan program tangga PLC
C. ganda silinder sirkuit aksi sekuensial -3
Alokasi I / O : X0: PB / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B -
Diagram dan program tangga PLC
3-5-3 Sirkuit aksi timing katup solenoid tunggal
1. Tujuan latihan: untuk memahami penerapan PLC dalam kontrol tindakan waktu dari satu katup solenoid .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
A. ganda silinder kontrol waktu lingkaran
Konfigurasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X7: PB.2
Y1: SOL.A / Y2: SOL.B
Diagram dan program tangga PLC
B. Sirkuit kendali timing tiga silinder
Konfigurasi I / O : X0: PB.1 / X2: MS.2 / X4: MS.4 / X7: PB.2
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C
Diagram dan program tangga PLC
3-5-4 Sirkuit aksi timing katup solenoid ganda
1. Tujuan latihan: untuk memahami penerapan PLC dalam kontrol tindakan waktu katup solenoid ganda .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
A. ganda silinder kontrol waktu lingkaran
I / O°t¸m: X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X7: PB.2
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B -
Diagram dan program tangga PLC
B. Sirkuit kendali timing tiga silinder
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X5: MS.5 / X6: MS.6
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B - /
Y5: SOL.C + / Y6: SOL.C -
Diagram dan program tangga PLC
3-5-5 katup solenoid tunggal menghitung silinder ganda rangkaian kontrol tindakan berulang
1. Tujuan latihan: untuk memahami penerapan PLC dalam kontrol tindakan penghitungan katup solenoid tunggal .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Alokasi I / O : X0: PB.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 / X7: PB.2
Y1: SOL.A / Y2: SOL.B
Diagram dan program tangga PLC
3-5-6 sirkuit kontrol aksi penghitungan silinder ganda solenoid valve ganda
1. Tujuan latihan: untuk memahami penerapan PLC dalam kontrol aksi penghitungan katup solenoid ganda .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X7: PB.2
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B -
3-5-7 Katup solenoid ganda rangkaian urutan tiga silinder tindakan urutan balik urutan balik setelah penghentian darurat
1. Praktek tujuan: untuk memahami penerapan PLC 's MC (Master Control) instruksi dalam berhenti darurat urutan terbalik kontrol kembali.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (b) untuk sirkuit pneumatik
Alokasi I / O : X0: PB.1 / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X5: MS.5 / X6: MS.6 / X7: EMS-PB
Y1: SOL.A + / Y2: SOL.A - / Y3: SOL.B + / Y4: SOL.B - /
Y5: SOL.C + / Y6: SOL.C -
Diagram dan program tangga PLC
3-5-8 Katup solenoid tunggal tiga tindakan urutan silinder loop kontrol ulang urutan berhenti darurat
1. Tujuan latihan: untuk memahami penerapan PLC dalam kontrol berhenti darurat dari tindakan urutan.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Alokasi I / O : X0: PB / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X5: MS.5 / X6: MS.6 / X7: EMS-PB
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C
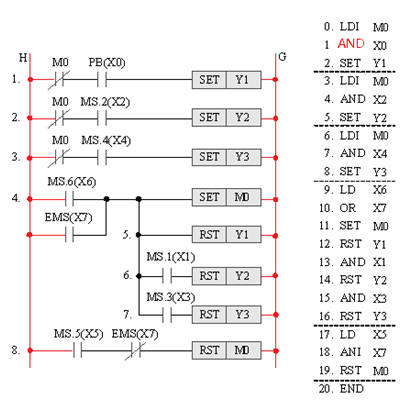
Diagram dan program tangga PLC
3-5-9 Katup solenoid tunggal rangkaian tiga silinder tindakan menghentikan darurat kembalisirkuit kontrol
1. Tujuan latihan: untuk memahami penerapan PLC dalam kontrol berhenti darurat dari tindakan urutan.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Alokasi I / O : X0: PB / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X5: MS.5 / X6: MS.6 / X7: EMS-PB
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C
Diagram dan program tangga PLC
3-5-10 katup solenoid tunggal tiga putaran kontrol waktu aksi urutan silinder
1. Tujuan latihan: untuk memahami penerapan PLC dalam loop kendali waktu .
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Alokasi I / O : X0: PB / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X5 : MS.5 / X6 : MS.6
Y1 : SOL.A / Y2 : SOL.B / Y3 : SOL.
Diagram dan program tangga PLC
3-5-11 Katup solenoid tunggal tindakan urutan tiga silinder, berhenti darurat stroke sampai akhir, lanjutkan loop kontrol tindakan
1. Tujuan latihan: untuk memahami penerapan PLC dalam loop kontrol berhenti darurat dari tindakan urutan.
2. Gunakan sirkuit dan program:
Lihat Gambar 3-8 (a) untuk sirkuit pneumatik
Alokasi I / O : X0: PB / X1: MS.1 / X2: MS.2 / X3: MS.3 / X4: MS.4 /
X5: MS.5 / X6: MS.6 / X7: EMS-PB
Y1: SOL.A / Y2: SOL.B / Y3: SOL.C
3-5-12¡@Aksi urutan tiga silinder menghentikan sirkuit kontrol tengah
1. Tujuan latihan: untuk memahami penerapan kontrol keseimbangan silinder beban dan kontrol berhenti tengah tindakan sekuens PLC .
2. Gunakan sirkuit dan program:
Perpindahan - diagram waktu
Diagram sirkuit tekanan udara
Konfigurasi I / O : X0: PB.1 / X1: a0 / X2: a1 / X3: b0 / X4: b1 /
X5: c0 / X6: c1 / X7: c2
Y0: SOL.A / Y1: SOL.B / Y2: SOL.C + / Y3: SOL.C -
Program PLC
3-5-13 Tiga¡@silinder berurutan loop kontrol kecepatan dua tahap
1. Tujuan latihan: untuk memahami penerapan kontrol s PLC di tengah aksi urutan.
2. Gunakan sirkuit dan program:
Perpindahan - diagram waktu
Diagram sirkuit tekanan udara
I / O°t¸m: X10: PB.1 / X0: a0 / X1: a1 / X2: a2 / X3: B0 / X4: b1 / X5: c0 / X6: c1 / X7: EMS-PB2
Y0: RL / Y1: SOL.A + / Y2: SOL.A - /Y3:SOL.B+/Y4:SOL.B - / Y5: SOL.C + / Y6: SOL.C - /Y7:SOL.V/ Y10 : SOL.H
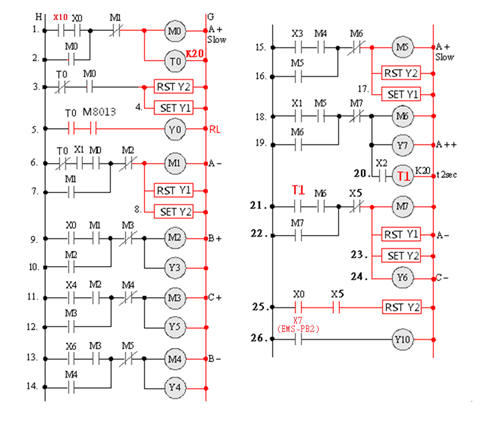
Diagram tangga PLC
Program PLC
INDEX:
[1] Hubungan
antara sinyal posisi dan sakelar : hubungan antara
sinyal pemicu posisi silinder pneumatik dan sakelar buluh selama gerakan
stroke dan gerakan sakelar berikutnya. Mengambil A
+ B + B - A -
sebagai
contoh, hubungan antara sinyal posisi dan sakelar ditunjukkan sebagai
berikut:
[2] Perpindahan - grafik waktu: grafik yang menunjukkan keadaan kerja silinder pneumatik, pada gambar, sumbu horizontal adalah waktu, sumbu vertikal adalah perpindahan, dan kemiringan adalah kecepatan.
Mengambil A + B + B - B + B - A - sebagai contoh, silinder B lambat dan cepat mundur, dan diagram perpindahan - waktu adalah sebagai berikut:
¡@
