Bab 4 Desain Sirkuit Sistem Kontrol Tekanan Udara
Guru Goto Zulie mengajar jaringan praktik kontrol gas hidrolik
4-1 Langkah Dasar Desain Sirkuit untuk Sistem Pneumatik
Langkah
1: Gambar diagram kerjaP137
Langkah 2: Tulis urutan gerakan silinder pneumatik dalam sistem
(1) perpindahan - . Langkah dari Gambar (Travel-LANGKAH Diagram)
(2) perpindahan - diagram waktu (Diagram Travel-Time , juga dikenal sebagai waktu - Gambar perjalanan )
Langkah 3: Desain
sirkuit kontrol tekanan udara sesuai
dengan bagan fungsi ( atau
bagan sinyal kontrol )

Rangkaian kontrol tekanan udara yang dibahas dalam bab ini terutama didasarkan pada kontrol tekanan udara murni tradisional. Tekanan operasinya adalah 3 hingga 8 kgf / cm 2 , output antara 0 hingga 3000 kgf, dan kecepatan antara 0,5 hingga 1,5 m / detik . Berikut ini adalah Beberapa metode desain sirkuit pneumatik murni yang biasa digunakan.
1 . Metode Intuitif.
2 . Metode Cascade.
3 . Metode Cycle langkah.
4-2 metode intuitif (Metode atau Intuisi)
Metode pemrosesan sinyal dari perwujudan
desain ini memiliki cara berikut:
1. berdiri
gelombang sinyal [ stagnasi (Standing) modus ] :
sinyal yang digunakan secara umum untuk dua arah silinder pneumatik melekat pada
roda 𤪱 Stroke akhir, sinyal gelombang berdiri, seperti terlihat pada gambar 4
-8 ditampilkan.
2. sinyal pulsa [ overstroke (atas perjalanan) modus ] : Setelah menggunakan sinyal gangguan, sebuah searah 𤪱 roda dipasang ke ujung bagian dalam stroke silinder pneumatik, sentuh pulsa kiri sinyal yang dihasilkan, tidak memicu kembali sebagai 4- ditampilkan dalam 9
Desain intuitif dari sirkuit pneumatik dapat menggunakan metode Gambar 4-10 untuk melakukan satu per satu
======================================================= =====================
¡@
(B) Gambarlah sebuah film , yang diwakili oleh diagram waktu perpindahan, seperti yang ditunjukkan pada Gambar 4-12 . Pada saat yang sama, urutan latihannya tercantum dalam singkatan: A + B + AB-
(c) Memetakan dari sirkuit tekanan udara
Tentukan metode operasi yang digunakan oleh saklar batas ( rol searah atau dua arah ) : Ketika konflik sinyal pada dua sisi elemen kontrol arah disebabkan, sinyal interferensi perlu diproses menjadi sinyal pulsa oleh overtravel ( yaitu, saklar batas harus searah Rol dan bergerak ke dalam ) . Elemen sinyal yang tersisa digerakkan oleh rol dua arah. Dapat didirikan di bawah gangguan tabel analisis analisis
Contoh 4-2 dari desain sirkuit kontrol pneumatik mesin paku keling
(a) Diagram kerja
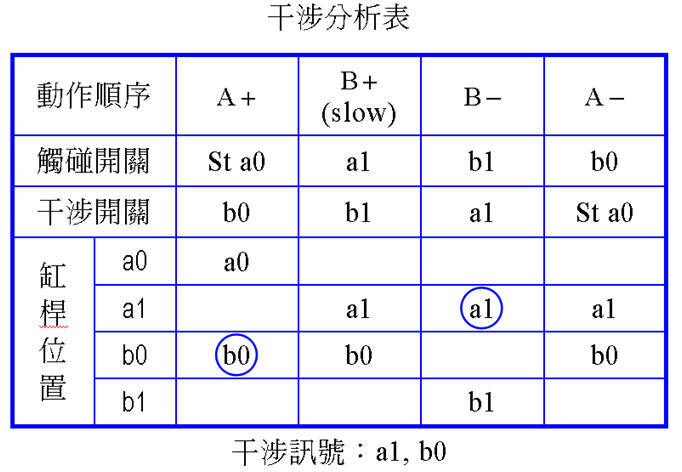
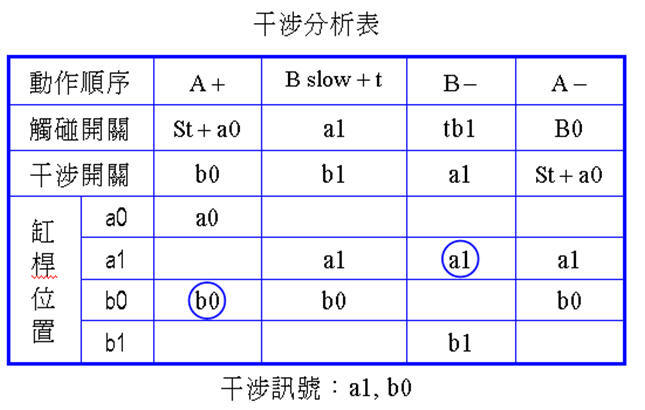
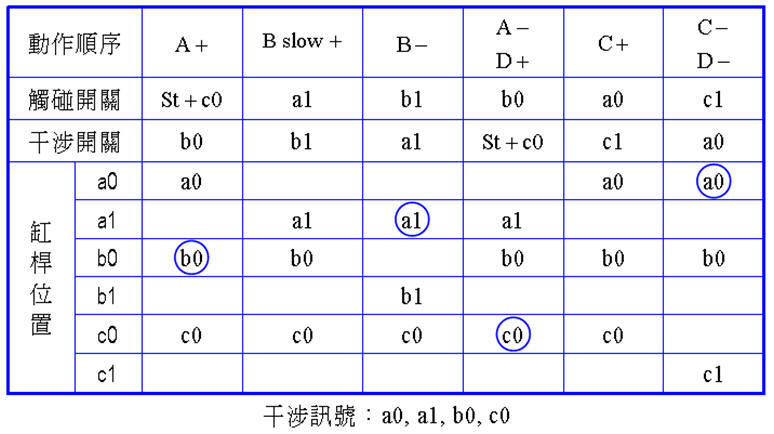
Contoh 4-3 Desain
loop kontrol tekanan udara untuk pengeboran. (a) Diagram
waktu perpindahan.
Urutan latihan adalah:
A + B lambat +
B- A-.
¡@
Sinyal interferensi adalah a1 dan b0 . Ubah roller tunggal untuk bergerak ke dalam mode overtravel.
Contoh 4-4 Desain sirkuit kontrol pneumatik untuk pengeboran dan pembongkaran otomatis dengan operasi siklus tunggal dan fungsi siklus pemrosesan kontinu.
(a) Diagram kerja
¡@
Contoh 4-5 Desain sirkuit pengontrol tekanan bahan kimia untuk membersihkan wadah.
(a) Diagram kerja

¡@
Metode kaskade (metode cascade) sistem dengan menggunakan 4/2 ( atau 5/2) Bilateral katup pneumatik ( atau disebut katup terbalik ) akses Signal transcytosis, sehingga operasi kontrol yang rumit untuk memastikan bahwa setiap kembali output sinyal hanya:
Ambil Gambar 4-27 sebagai contoh:
Contoh 4-6 Coba
desain sirkuit kontrol tekanan udara berikut dengan metode kaskade.
Grafik waktu perpindahan ditunjukkan
pada Gambar 4-33 .
¡@
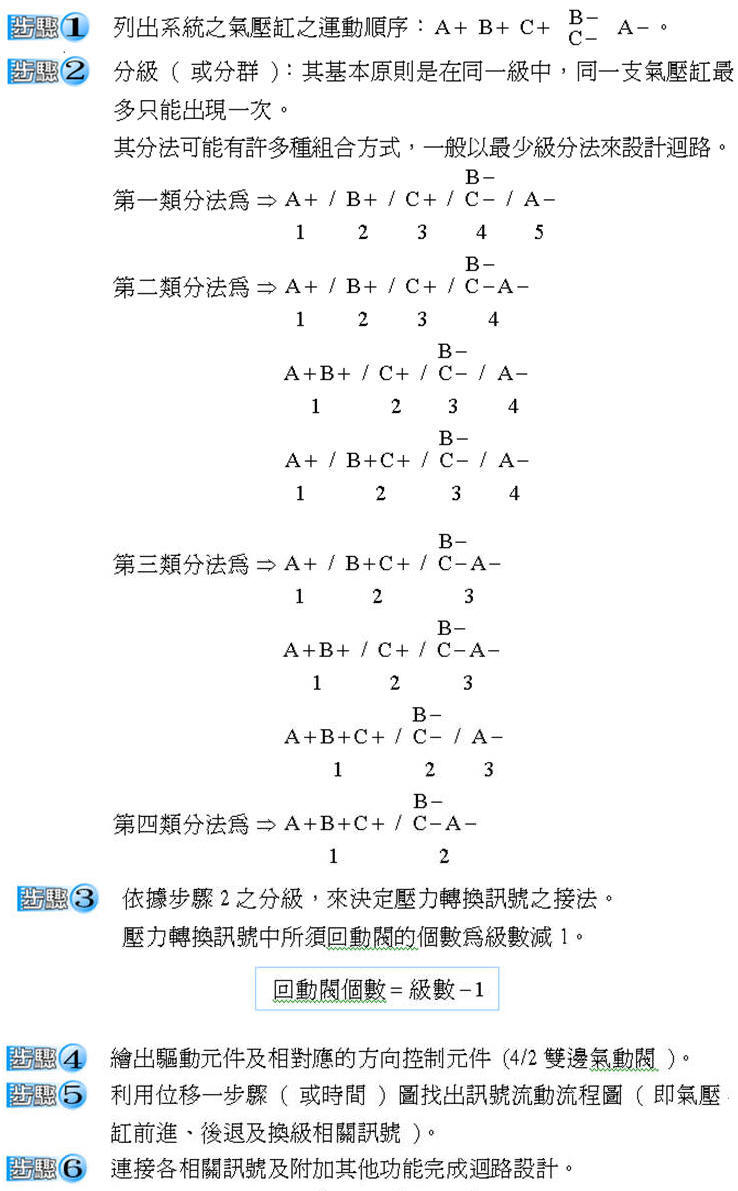
Langkah 1 : Buat urutan latihan
Langkah 2 : Klasifikasi. Langkah 3 :
Gambar sinyal konversi tekanan. Langkah 4 :
Gambar elemen drive, elemen kontrol arah, dan batasi posisi sakelar dan beri
nama sesuai abjad.
¡@
Langkah 5 : Sebutkan aliran sinyal dan sambungkan sinyal yang relevan untuk menyelesaikan loop.
Contoh 4-7 Cobalah untuk merancang sirkuit kontrol tekanan udara dalam urutan diagram tindakan.



Contoh 4-8 Waktu perpindahan kerja mesin giling ditunjukkan pada Gambar 4-40.
Contoh 4-9 Diagram skematis dari pekerjaan peledakan bead dan langkah-langkah perpindahan casting ditunjukkan pada Gambar 4-43 dan 44.


Langkah 6 : Hubungkan sinyal yang relevan untuk menyelesaikan desain sirkuit.
¡@
Langkah-langkah perpindahan dari Contoh 4-10 ditunjukkan pada Gambar 4-47.


4-4 Siklus Kontrol Langkah Metode Desain Sirkuit


Contoh 4-11 Mencetak logo secara terus menerus. Gambar 4-51 adalah diagram skematiknya. Gambar 4-52 menunjukkan langkah-langkah perpindahan.

Langkah 5 : Temukan aliran sinyal.

Langkah 6 : Hubungkan sinyal terkait dan tambahkan kondisi tambahan untuk menyelesaikan desain sirkuit.
Dirancang oleh metode struktur maksimum:

Contoh 4-12 bengkok dan bengkok penjepit, Gambar 4-56 adalah diagram skematis dari pekerjaan ini. Gambar 4-57 adalah grafik waktu perpindahan.
¡@
Langkah 1 : Buat
daftar urutan latihan. 
Langkah 2 : Klasifikasi. Langkah 3 :
Gambar sinyal konversi tekanan. Langkah 4 :
Gambar elemen drive, elemen kontrol arah, dan posisi sakelar batas yang sesuai
dan beri nama dalam bentuk abjad.
¡@
Langkah 5 : Temukan aliran sinyal.

Langkah 6 : Hubungkan sinyal yang relevan, tambahkan kondisi tambahan (B , kontrol kecepatan C diperlukan,
Pemilihan manual dan otomatis) untuk melengkapi desain sirkuit.
¡@
GOTO Bab 5 Kontrol Listrik-Pneumatik
Guru Goto Zulie mengajar jaringan praktik kontrol gas hidrolik